



基于 PMAC 的數控系統手輪功能研究
2017-12-8 來源:天津職業技術師范 天津光電安辰信息 作者:岳剛 鄧三鵬 孫奇涵 曹川川 程貝貝
摘要: 闡述了數控系統手輪功能的相關知識。提出一種基于 VB 和 PMAC 實現數控系統手輪控制功能的方法。利用 VB編寫手輪功能上位機軟件,實現手輪數據的獲取與處理; 通過 PMAC 控制各軸的運動,實現數控系統的手輪控制功能,并給出關鍵的程序代碼。編制的程序代碼具有通用性和可移植性,并已在自主研發的基于 PMAC 的數控加工中心
VNCZT-545上成功應用。
關鍵詞: PMAC; 手輪功能; VB
PMAC 多軸運動控制板是由 Delta Tau 公司推出的低成本高精度多軸控制板,是工業領域最常用的運動控制板之一,廣泛應用于各數控系統中[1]。手輪功能在機床使用中占有很重要的位置,工件對刀、各軸微動控制都需要用到手輪。手輪功能的實現難點在于手輪和被控軸運動的跟隨性,跟隨性可分為兩個方面: 移動距離和移動速度。
文中提出一種基于 VB 和PMAC 實現手輪控制功能的方法。
1 、硬件結構
以自主研發的基于 PMAC 的數控加工中心系統VNCZT-545 為執行機構,手輪為控制機構,工控機為處理中樞,實現加工中心與手輪的運動跟隨。系統硬件連接如圖 1 所示。
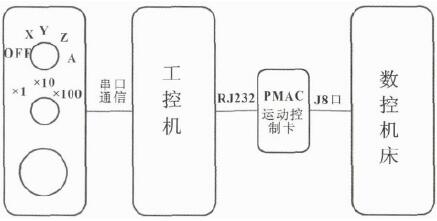
圖 1 系統硬件連接
手輪通過串口將數據傳輸到工控機上,由工控機上的用 VB 語言編寫的上位機軟件 ( 以后簡稱 VB 軟件) 進行數據處理,將處理后的數據通過網線傳輸給 PMAC 運動控制卡,最終驅動數控機床相應軸的運動。
2 、手輪數據設定
手輪通過串口發送給工控機的指令,由 VB 軟件存儲在相應的變量中,手輪與 VB 軟件的通信協議見表 1,DTC-32IN 端口配置見表 2。
表 1 手輪通信協議
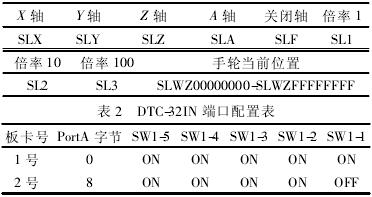
手輪通過串口與上位機相連接并實現通信。手輪相當于一個旋轉編碼器,旋轉手輪即可發出連續的 8位十六進制數 A,每一個手輪位置都有獨立的位置數A。上位機接收到當前手輪位置 A1之后,將其與上一次的位置 A0做差,得到差值 Δ。若 Δ > 0 則代表手輪正轉,若 Δ < 0 則代表手輪反轉,然后將 | Δ | 作為手輪移動距離。
3 、VB 軟件設計
在軟件界面可以實時顯示 X、Y、Z 三個坐標軸的當前位置、手輪當前位置、手輪旋轉量、手輪倍率、手輪旋轉速度。
通過 Jog + 可實現選中軸的點動正轉控制,Jog -實現選中軸的點動反轉控制,Stop 可使選中軸停轉,Home 可實現選中軸的回零操作。VB軟件界面如圖 2所示。
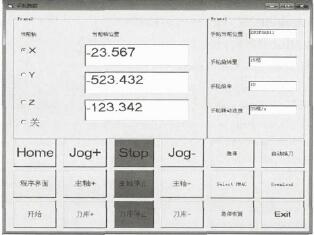
圖 2 VB 軟件界面
VB 軟件具體運行過程如下:在 VB 軟件中,通過命令 return_value = Pmac Ge-tResponse A( Device Number,response,255," #1 p" ) 實現軸的選擇; 通過給字符串變量 bl賦值,實現倍率的控制,即: bl= Mag · Δ; 通 過 命 令 return _ value =Pmac GetResponse A( 0,response,2," #" + Str( n) + "j: - " & bl) 實現選定軸的輪動。軟件流程如圖 3 所示。
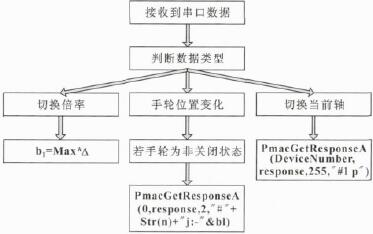
圖 3 VB 軟件流程圖
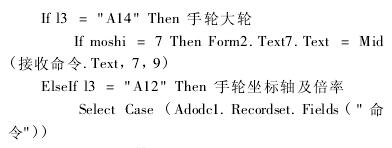
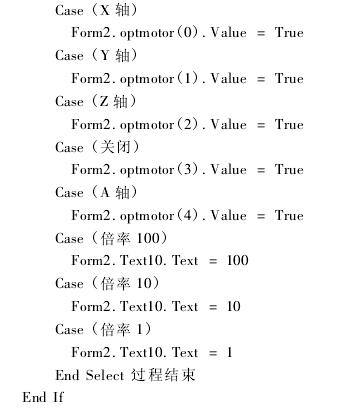
程序關鍵部分源代碼:

4 、實驗驗證
將上述手輪系統按圖 1 所示結構接線后,成功實現手輪的位置跟隨和速度跟隨。在圖 2 所示的軟件界面中,實現了 X、Y、Z 三個坐標軸位置、手輪當前位置、手輪旋轉量、手輪倍率和手輪旋轉速度的實時顯示。通過對比機床位置實際位置和軟件顯示位置,數據一致,說明位置跟隨準確。機床運行中無竄動,說明速度跟隨平穩。至此數控機床手輪功能的實現收到了良好的效果。
5 、結論
數控機床手輪功能的實現,是數控機床控制系統設計中重要的一環。文中詳細論述了利用 VB 軟件和PAMC 運動控制卡作為控制中樞,實現手輪運動和速度跟隨的方法,并通過實驗論證了方法的有效性。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

