



仿生曲線孔電火花機器人的研究
2016-11-15 來源:長春工業大學機電工程學院 作者:白羽 何山
摘要:仿生曲線孔電火花機器人模仿尺蠖運動方式,使用SMA(形狀記憶合金)彈簧產生驅動力。實現丈量式的移動。利用流體反沖力,使該機器人能夠在加工過程中實現靈活轉動,從而加工出設計好的曲線孔。分析了機器人轉彎原理,介紹了其驅動方式,結果表明,此種設計使加工液與被加工工件充分接觸,及時沖走加工廢渣,降低短路與拉弧的概率,提升了加工速度。
關鍵詞:曲線孔形狀記憶合金流體反沖力電火花加工
在塑料模具注塑行業中,隨著人們對高精度注塑零件需求的增多,對模具精度的要求也更加嚴格。超精密注塑模具的精度和表面質量達到一定程度后,繼續提高其精度和表面質量,注塑零件的整體質量不會得到相應的提升。為了能夠繼續提高注塑件的質量,精確的溫度控制十分重要。現今普遍采用擁有組合曲線孔冷卻通道的模具進行生產。但這種模具的冷卻道并不圓滑,對模具溫度的控制不能達到理想的精度。整體曲線孔冷卻道模具與組合曲線孔冷卻道模具相比,具有工作壽命長、溫度控制精度高及注塑零件質量好等特點[1],但整體曲線孔冷卻道的加工卻是一個難點。冷卻道的JJn-r往往借助曲線孔電火花加工技術,該技術在超精密注塑等行業中有著廣泛的應用前景。
國內外有很多學者對曲線孔加工進行了研究:東京大學的福井雅彥和木下夏夫通過外拉線轉彎的方法。設計出了一種鼠型電火花加工方法:三菱電氣公司的Akihiro GⅢ等借助SMA彈簧,設計了一種曲線孔電火花加工結構:日本電氣通信大學的石田澈和竹內芳美研究出了SMA驅動進給式曲線孑L電火花加工裝置;在國內。中國石油大學劉永紅等人b圳按照仿生學原理,發明了曲線孔仿生電火花加工機器人。
以上對于曲線孔電火花加工技術的研究。存在著若干問題:加工速率低、加工孔徑大、曲線孔深度淺、排屑困難等,不能順利加工出設計的曲線孔。筆者設計的曲線孑L電火花機器人,對原有的SMA曲線孔加工機器人進行了改進.在加工速率和加工環境上都得到了一定的提升。
1. 仿生機器人加工曲線孔的原理
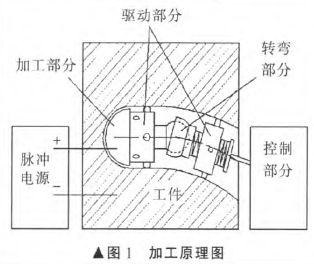
電火花加工r5-6](EDM)是把加工零件和工具分別作為兩個電極。利用電極間脈沖放電產生局部瞬間高溫熱量,使加工零件金屬材料實現熔化、氣化,蝕除多余金屬材料,使工件達到設計要求和電蝕加工工件的效果。電火花曲線孑L機器人加工原理如圖1所示。機器人設計主要有5部分:脈沖電源、加工部分、轉彎部分、驅動部分和控制部分。脈沖電源正極接加工機器人頭部,負極接到加工零件上。3個噴孔均布在機器人驅動部分前側,都與機身軸線呈相同夾角。驅動部分動力來源為驅動尾部的兩個彈簧,一個為普通彈簧,另一個為SMA彈簧。轉彎部分的目的是使機器人實現預定的轉彎。使加工軌跡與設定軌跡相符。控制部分要求主要有4條:03收集加工狀態與信息,反饋給控制中心;②調整加工液噴口處流量大小,使機器人按照規定軌跡轉彎;③控制機器人SMA彈簧,卡住或松開加工孔壁。實現機器人前部或后部機身的固定和前移;④控制尾部SMA彈簧,使之收縮或拉伸而推進機身前部分進給或帶動機身后部分向前蠕動。控制部分和機身由導管連接。導管內主要是導線和細導管,細導管負責運送加工液,由3個噴口噴出。
2. 驅動部分的構成及驅動原理
驅動部分的設計靈感來源于尺蠖的運動方式。尺蠖屬于無脊椎動物,昆蟲綱,鱗翅目,是尺蛾科昆蟲幼蟲的統稱。尺蠖幼蟲中間缺少一對足,以“丈量”或“屈伸”樣的步態移動,即身體前半部分伸長,再移動身體后半部分使前后部分整體連接移動[7]。筆者設計的機器人前后支撐相當于尺蠖的前后足;用來轉彎的萬向節,模仿的是尺蠖所缺少的那一對足[引。該仿生機器人與尺蠖運動方式又不完全相同,相同的地方在于向前運動方式基本一致,同為伸長或縮短身體,實現整體的移動.不同處在轉彎的方式上,仿生機器人主要依靠流體反沖力產生的力矩來實現身體的扭轉。仿生電火花曲線孔機器人結構簡圖如圖2所示。
圖2中,機器人加工方向向左,機器人頭部為加l電極;加工液噴射孔的噴射方向為斜向前;前支撐、后支撐內部有SMA彈簧,不通電時處于撐緊狀態;萬向節的主要結構是球副;普通彈簧和尾部SMA彈簧都處于壓縮狀態,留有一定的預緊力。
整個驅動過程分為5步:①后支撐SMA斷電時,3個撐腳處于撐緊狀態,與孔壁產生摩擦力,使后支撐固定在當前位置。②前支撐SMA通電,緊抱孑L壁的撐腳松開,固定作用消失。③尾部SMA彈簧通電,由于金屬記憶,該SMA彈簧收縮,推動機器人前半部分向前進給,同時前支撐內加工液從3個小孑L中以一定流速噴出,在彈簧彈力和流體反沖力的綜合作用下,機器人前部向前蠕動,并實現一定角度的轉向。配合電火花頭進行加工。④機器人頭部加工到極限位置.電火花頭部停止放電加工,前支撐SMA斷電,撐緊孔壁,機器人前半部分固定。⑤后支撐SMA通電,撐腳松開,后支撐不再起固定作用,此時尾部SMA彈簧斷電,普通彈簧逐漸收縮,尾部SMA逐漸伸長,直到兩個彈簧彈力大小相等,這一過程中,機器人后半部分機身向前移動。第5步完成后,仿生電火花曲線孔機器人就完成了一個運動周期,之后重新開始執行第一步.如此反復,機器人即可沿著預設路徑向前加工。
3.轉彎過程中流體反沖力的分析
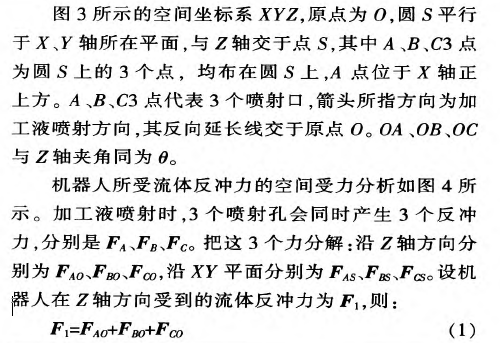
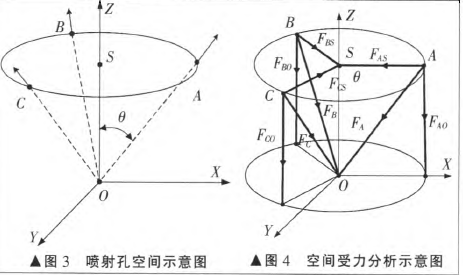
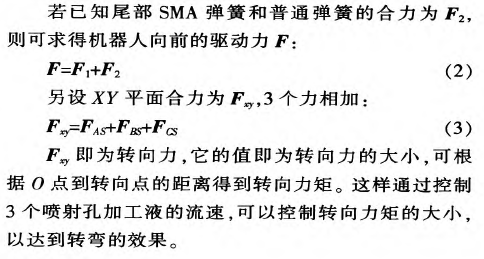
圖2中,結構4是一個萬向節,它是實現機器人轉彎的必要條件,配合流體反沖力產生的力矩,才能實現轉向。圖3為噴射孔的空間示意圖。
4.結論
仿生曲線孔電火花機器人具有如下特點。
(1)利用仿生學,通過SMA彈簧的伸縮,模仿了尺蠖蠕動過程:
(2)加工液反沖力與尾部SMA彈簧同時作用產生推進力,且推進力可通過控制噴口流量進行調整:
(3)設計了一種噴射轉彎結構,通過加工液噴射流速產生的反沖力,實現機器人空間轉向功能;
(4)加工液直接噴射至加工面上.及時對加工部位降溫和沖洗,降低拉弧短路幾率,提高生產效率。
仿生曲線孔電火花機器人能夠改善曲線孔加工環境,提高加工速度,并且能完成較為復雜的空間曲線孔的加工。但該機器人設計還處于初步階段,對于加工精度、軌跡控制等方面還有待于繼續研究。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

