



機器臂控制系統設計
2016-11-9 來源:佳木斯大學 作者:周虹
摘要:機械臂主從式結構被廣泛應用于微創手術和遙操作中,分為主臂系統和從臂系統,而控制系統在主從機器臂系統中居于核心地位.本文針對機械臂的控制系統,給出了了機械臂的控制系統總體方案;通過設計機械臂運動控制方案分,-t1給出基于CAN總線的伺服運動控制單元和基于運動控制卡的伺服運動控制單元;針時控制系統軟件,設計了軟件的總體結構和容錯設計:為了更好的對機械臂進行運動規劃控制,提出了插補法進行運動規劃。通過運行試驗表明,該運動規劃是可行的,有效的。
關鍵詞:機械臂:控制系統;運動規劃
機械臂主從式結構被廣泛應用于微創手術和遙操作中,分為主臂系統和從臂系統。主臂系統由一對主臂和一個監視器構成:從臂系統由用于具體定位的機器人手臂組成。目前主操作臂的應用已經商品化.本文針對從臂的控制采用關節控制方式將主臂和從臂的關節一一對應。即主臂的各個關節獨立控制從臂的各個關節,對應關系比較簡單,且各個關節之間相互獨立與解耦,比較容易實現,適合與主從同構的情況下。
1.控制系統總體方案
機器人控制系統在主從機器人系統中居于核心地位,起著協調主從機械臂監控對象,為操作者提供操作信息的作用。主從控制系統系統一般由操作者、主手、控制系統、從手和操作目標5部分構成.如圖1所示。

圖1控制系統的構成
2.機械臂運動控制方案
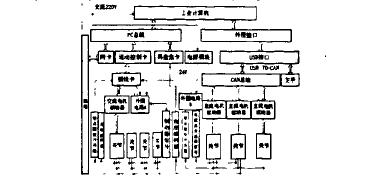
圖2機械臂運動控制方案
運動控制系統是機械臂控制系統中的核心部分.其中硬件部分主要包括工業控制計算機、從手伺服控制單元、機械臂控制單元、碼盤數據采集卡、外圍電路板等部分。控制方案如圖2所示。
2.1基于CAN總線的伺服運動控制單元
CAN總線驅動能力強,在短距離mm)條件下具有高速(1Mbit/s)數據傳輸能力,可掛接多達127個網絡節點。所有參加CAN總線的分系統都可以通過其控制單元上的CAN總線接口進行數據的發送和接收。當某一單元出現故障時不會影響其他單元的工作。基于CAN總線驅動能力比較強的特點.選擇了支持CAN總線的驅動器——德國產品EPOS系列。機械臂有4個直流電機。根據各電機功率要求.選擇了EPOS24/1和EPOS24/5兩種類型的驅動器,通過CAN總線連接各個驅動器作為控制節點.如圖3-4所示。再通過CAN總線與USB轉接1:3與工控機通信.便于整體控制與協調運動。轉接El選用德國IXXAT公司PC/CAN接口USB—to—CAN compact。
2.2基于運動控制卡的伺服運動控制單元
號為運GE動80控0?制P卡V:選用同高公司生產的GE系列運動控制器.型 PCI G。該控制器的核心由DSP和FPGA組成,能夠實現同時控制8個軸協調運動,可編程梯形曲線規劃和S曲線規劃。控制器支持模擬量與脈沖量兩種輸出方式,具有16路通用數字I/O端口。每個軸都具有原點Home信號捕獲、編碼器Index信號捕獲、電機正負限位等功能。同時還提供了12位精度的A/D轉換器和RS232串行通訊擴展功能。
電機與驅動器:每條機械臂的移動關節主要是實現整體的升降,因為承載比較大,需要提供約200W的輸出功率,因此決定采用交流電機來實現這一功能。選用安川I交流伺服電機YASKAWA SGDM,配套的驅動器型號為SGMJV 04AYAA6C。根機器人出現失控狀態,并給出操作者相應的警告信息。據電機的功率.選用ACJ-055—18型直流伺服驅動器和ACK一055--06型直流伺服驅動器。
3.控制系統軟件設計
3.1軟件總體結構
對于機器人控制系統來說根據完成功能的不同可以劃分為機器人控制部分、規劃部分以及其它輔助部分.采用面向對象的設計方法在控制軟件中將以上幾部分封裝到了相應類中,即電機類、控制類、規劃類、輔助類以及機器人類這幾個功能類。類對象的結構圖見圖3。
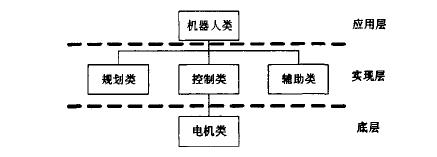
圖3類對象的結構圖
電機類主要負責控制單個電機運動,屬于底層類,它封裝了運動控制器對電機操作的所有接口函數,若要更換不同型號的運動控制器只需要重新編寫該類內各成員函數的具體實現代碼即可.大大提高了軟件的通用性和擴展性。控制類負責總體管理電機使它們協調運動。實際上它是通過控制各個關節對應的電機類,再由電機類直接控制電機以此實現協調電機運動的目的。
規劃類是實現軌跡規劃功能的一個類.由于機器人的不同動作的規劃方式都不同。因此每個動作都對應了一種規劃類.RobotPlan類內包含運動學、逆運動學、主從手運動學轉換關系式等函數.圓錐擺規劃類與普通的規劃類都是由RobotPlan派生而來的子類。輔助類主要用于管理機器人的其它輔助性操作.主要包括通過串口與數據采集卡分別獲取外置光電編碼器反饋的脈沖數、控制電磁離合器吸合。
機器人類是處于軟件頂層的類。它能夠協調以上提到的所有類。其代表整個機器人的實體,通過控制機器人類就能夠使機器人完成各種運動。
3.2控制軟件的容錯性設計
操作者在使用軟件時難免會有誤操作的情況,在實際運行中如果控制軟件不能夠檢測出這種錯誤,可能會對機器人造成損壞。因此需要一些容錯性設計。主要體現在以下三個方面。跟蹤誤差極限:如果實際位置誤差滯后超出預設值,控制器將中斷出錯電機.發送運動出錯指令。這種情況一般發生在位置反饋消失、系統響應速度較慢或電機發生故障時。速度限制:主從控制中,當操作主手動作過快時。關節速度就會很大,影響運動精度的同時,也給手術帶來風險,為此運動時檢測運動速度,當首次速度接近電機極限速度時,給出警告,若連續兩次運動速度過大時,從手機械臂就會停止運動,不再接收主手的信息。
位置限制:軟件還對增加了從手機械臂極限位置的限制,當運行到接近機械臂極限位置時,主手增加力反饋,使操作者感到阻力增大而減緩運動或者調整主手位姿重新運動。當超出極限位置時從手自動停止運動。
控制軟件的容錯性設計使操作者在誤操作的時候,不會對機器人出現失控狀態,并給出操作者相應的警告信息。據電機的功率.選用ACJ-055—18型直流伺服驅動器和ACK一055--06型直流伺服驅動器。
4.運動規劃
當機器臂末端從初始位置運動到目標位置時.就是在關節空間中進行軌跡規劃。首先將關節變量映射成時間的函數,并規劃它的一階和二階時間導數。當指定好末端器械的起始位姿、終止位姿以及若干中間位姿后首先通過運動學反解將各路徑點轉換成關節角度值,然后對每個關節擬合一個光滑函數,使之從起始點開始,依次通過所有路徑點,最后到達目標點。本節根據實際需要,選擇了兩種插值計算方法:帶拋物線過渡的直線插補與多項式插補。
1.帶拋物線過渡的直線插補
各個關節在相鄰路徑點之間采用線性插值.同時為了避免角速度突變.插值初期采用拋物線過渡。由于運動控制卡提供了帶拋物線過渡的直線插補函數.所以只需要直接調用就可以。這里不再做過多敘述。
2.多項式插補
對于多項式插補,本文采用4—3—4軌跡法.即每次運動每個關節都有三段運動軌跡:第一段由初始點到提升點的軌跡用四次多項式表示.中間段由提升點到下放點的軌跡用三次多項式表示,最后一段由下放點到終止點的軌跡由四次多項式表示。同時.還需要滿足一定的約束條件。如各關節的位移、速度和加速度在整個時間問隔內連續性要求.其極值必須在各個關節變量的允許范圍之內等。根據所求方程求解要求.需要考慮14個邊界條件:起始點的位置、速度與加速度:中間點位置:中間點位置、速度與加速度的連續性:終止點的位置、速度與加速度。考慮這些邊界和過渡條件規劃出這條軌跡.求解出解析式:

選取機器人路徑點見表1.這里采用在關節空間內等分關節角來規劃路徑點,運行速度可以更加平穩,經過規劃后得到的機器人各關節軌跡、速度與加速度曲線,其中關節1如圖4。
表1機器人路徑點
表1
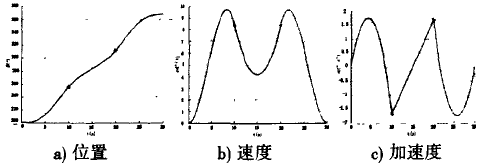
圖4關節I關節空間規劃
5.本章小結
本文設計了機器臂控制系統總的控制方案和構成.并對硬件系統作說明。此外。針對控制系統進行了軟件總體設計和軟件容錯設計通過插補法實現機械臂的運動規劃,并通過仿真實驗,表明方法是有效的,實用的。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

