



不確定機器臂系統的魯棒追蹤控制設計
2016-10-13 來源:常州大學 作者:陳嵐萍,馬正華,薛國新
摘要:針對機器臂的不確定動力學參數和外部未知干擾,提出了一種自適應雅格比追蹤控制策略,運用李亞普諾夫方法及滑模控制來加強系統的漸進穩定性,可使機器臂末端裝置的運動誤差漸進收斂到零。仿真結果表明,該控制器運用于二自由度機器臂具有較好的魯棒性和動態性能。
關鍵詞:魯棒性;雅各比追蹤控制;滑模控制;機器臂控制;不確定性
1.引言
關于機器人的研究課題已越來越多地受到關注,但由于大量的動態耦合,如不同關節之間、未知干擾以及時變參數等,越來越需要具有魯棒性f、自適應性、快速收斂和結構簡單的控制策略。
目前研究人員已開發設計了一些不確定系統控制器,例如自適應控制¨1、滑模控制舊J、被動控制舊1及李亞普諾夫穩定性控制H1等,這些控制器需要補償這些結構不確定參數和有界干擾。其控制策略易局限于設定點控制或未知有界常數控制,因此,不確定系統的控制器設計仍然是一個很大的挑戰。本文針對機器人軌跡追蹤,提出了一種運用視覺信息作為反饋信號的目標空間自適應雅格比(Jacobian)控制策略。這種白適應魯棒控制策略設計不是依賴于未知有界參數的先驗知識,而依賴于在線估計未知矢量,在每一時刻,控制輸入可以補償存在的未知參數。使用這種反轉動態和滑模控制理論可加強閉環穩定性,改善動態性能,如末端裝置運動的追蹤誤差或快速收斂性。仿真結果表明了該控制策略的有效性。
2.問題描述
機器臂期望的末端裝置的位置定義在任務空間,取X∈Rn為任務空間矢量,依據參考文獻[5]可描述為

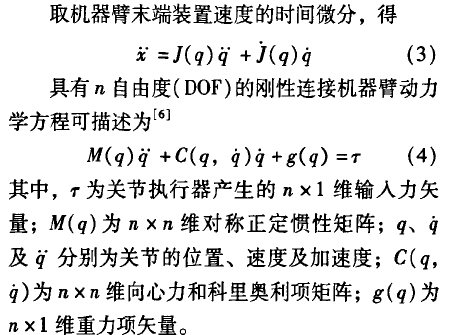
考慮如外部干擾和參數變動等系統不確定項,系統動力學模型方程(4)可描述為
具有乃個廣義坐標的n輸入n輸出二階非線性仿射系統的動力學模型可描述為
考慮不確定性,n自由度機械系統形式為
則所有包含非建模動態和其它未知外部干擾的不確定項可統一描述為
將式(8)代入式(7)得
比較式(5)和式(9),則
3.自適應魯棒控制器設計
追蹤控制問題可通過保持系統軌跡在滑模面S=O[71上得到解決,滑模面可取為
其中,S(t)為n×l維矢量;A為n×n維對角正
由式(10)知

考慮非線性不確定動態系統,如式(7)所示,若魯棒控制率取為

其中,K為需要設計的對角正定常數矩陣;F定義為預測干擾;則具有模型及干擾不確定性的機器臂系統可獲得漸進魯棒穩定性。
取Lyapunov函數

則Lyapunov函數微分可表示為
設計自適應率為

則式(15)可轉換為
若滿足設計的控制率和自適應更新率;則y關于.s負定;即任意非零初始值的軌跡誤差將漸進收斂于滑模面S=0,從而保證機器臂系統魯棒穩定性。
4.仿真實例
以圖1所示2自由度機器臂系統方程為例仿真。
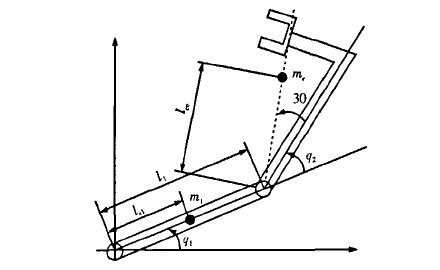
圖1 2自由度串聯機器臂機構圖
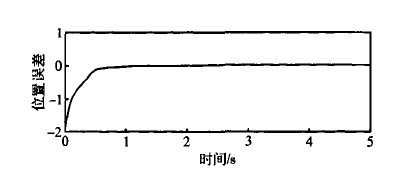
圖2關節1的位置追蹤誤差
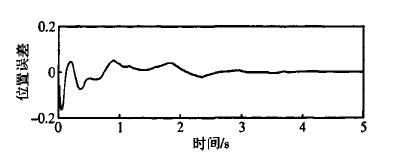
圖3關節2的位置追蹤誤差
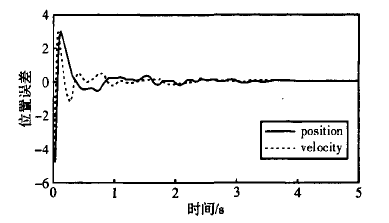
圖4機器臂末端裝置的追蹤誤差
仿真結果表明,盡管所有的不確定性包括機器臂動力學及外部干擾,但機器臂追蹤誤差能較快收斂到零。證明了本文提出的自適應控制策略追蹤誤差較小及誤差較快收斂到零,具有較好的有效性。
5.結論
本文提出的控制方案綜合了Jacobian自適應控制、滑模控制和反轉動態控制,基于Lyapunov穩定性分析表明機器臂系統漸進穩定。仿真結果也證實了盡管機器臂系統引進了包括變化的動態參數和未知干擾等不確定項,但本文提出的控制器具有較好的魯棒追蹤性能,使提出的控制策略動態地修正控制子空間及目標,使其收斂到實際值。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

