



常見數控系統的螺距補償方法
2020-4-20 來源: 陜西汽車控股集團有限公司 作者: 張金權
摘要:本文針對MAZATROL系統和OKUMA系統常見的兩種螺距補償方法做一闡述,方便數控機床精度檢測和誤差修復的人士參考。掃碼了解更多
螺距誤差補償是通過專業檢測裝置對機床實際移動的距離和指令移動的距離之差的補償,通過調整數控系統的參數增減指令的脈沖數,實現機床實際移動距離與指令值相接近,以提高機床的定位精度。
螺距誤差補償只對機床補償段起作用,根據機床所測軸長度合理分段(分段越多,機床實際移動距離檢測越接近真實位移曲線,所得誤差數據分析經過補償后機床精度越高),編制被測軸螺距補償程序,然后對螺距補償相關參數進行設定。
常見的三種數控系統螺距補償中,FANUC系統采用手動補償方法,在很多文獻都有說明,在此不做贅述。下面主要針對其他兩種方法進行敘述。
1 . MAZATROL 系統螺距 補償
螺距補償需要點擊“診斷”頁面,先按“版本”,翻頁后,輸入密碼1131,如圖1所示。進入補償畫面,進行螺距補償時,MAZATROL系統中,X軸定義為1,如圖2所示,Y軸定義為2,Z軸定義為3,4軸定義為4。
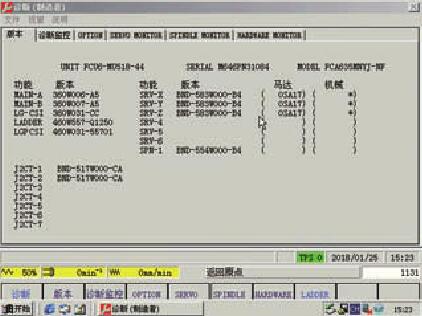
圖 1
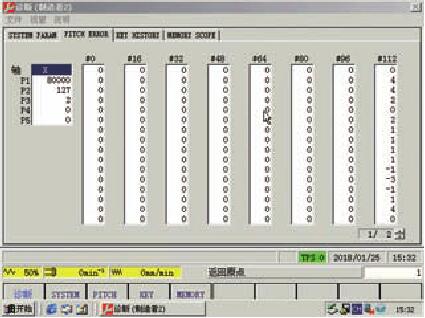
圖 2
P1參數標準設置為80 000,表示80mm,旋轉軸時標準設置為10 000,表示10°。P2設置為127,P3設置為2,4軸也是一樣。P4、P5設置為對應X軸、Y軸、Z軸,4軸為0、1、2、3(P4和P5設置必須一致)。
從第127位開始輸入對應的螺補補償,間距對應關系為127位,永遠為0值,四軸為0°;126位對應間距40mm,四軸為5°;125對應間距80mm,四軸為10°;1 2 4 對應間距 1 2 0 m m ,四軸為
15°;123對應間距160m m,四軸為20°,以此類推。
螺距補償時首先將激光干涉儀取樣的結果進行分析,補償反向間隙誤差,然后采用相對補償方法進行計算,如附表所示。
相對補償方法計算表

因為機床采用絕對值補償,所以用測量的讀值直接進行補正,不需要進行計算,第二次補正在原基礎上加減即可;補償方向從127位開始,第一個是行程的30,第二個是60,以此類推。補償注意事項:螺距及反向間隙補償時一定要對準需要補償的欄目,防止誤操作導致補償錯誤。
2.OKUMA系統螺距補償
螺距補償前需要進行參數設置,首先按下參數設置按鈕,因為出廠設置某些菜單是被屏蔽掉的,所以首次操作需要先進行菜單設置,按下右擴展鍵,如圖3所示,選擇菜單變更按鈕,全部顯示,菜單設置完成。接著需要設置螺距補償參數,將參數畫面切換到系統參數設定畫面,根據軸長度及行程極限設定好對應的螺距補償極限值,再找到螺距補償間隔參數,根據絲杠螺距設定好參數,然后設定螺距點數參數,螺距補償會在出廠時進行一次,因而上述參數欄中會被設定好,只需做好檢查即可。

圖 3
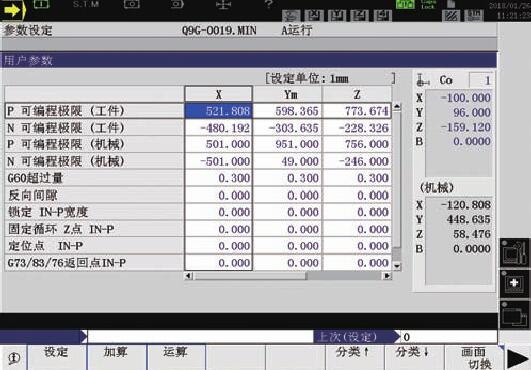
圖 4
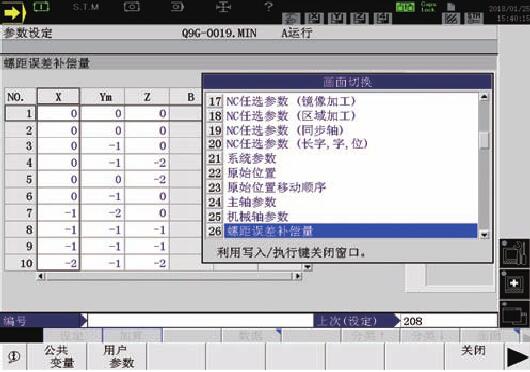
圖 5
進入螺距補償界面,分析激光干涉儀測量得到的補償數據,首先將反向間隙數據補償到如圖4反向間隙參數中,然后將螺距誤差值補償到如圖5所示的螺距誤差補償量表中,需要注意的是,OKUMA系統為絕對值補償,測量得到的結果直接和原值計算后將結果輸入即可。
螺距補償及反向間隙設置過程中注意事項,OKUMA系統參數設定有兩種方式,一種是直接設定,另一種是加算方式,直接設定時因為原值會被設定值覆蓋,所以要確保設置位置和輸入數值正確,防止誤設。加算設置,就是在原值基礎上加上設定欄的數值,也需要放置誤設。
螺距補償針對不同系統機床有不同的方法,但補償原理基本一致,補償過程中需要注意的細節問題也比較多,因而,在我們平時工作過程中,要注意積累經驗,歸納總結各種補償方法,以便于調整恢復各類機床精度。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

