控")



伺服控制系統(tǒng)的復(fù)合模糊自適應(yīng) PID 控制
2018-9-29 來源:西南交通大學(xué) 機械工程學(xué)院 作者:余 容,孫浩然,何朝明
摘要: 以工程中的伺服控制系統(tǒng)為研究對象,提出一種嵌入比例因子的復(fù)合模糊自適應(yīng) PID 控制方法,即將比例因子模糊控制與模糊 PID 控制結(jié)合而成的復(fù)合模糊控制。首先通過 MATLAB /Simulink系統(tǒng)工具對無干擾理想狀況下的系統(tǒng)進行仿真與分析,然后進一步模擬真實環(huán)境下的系統(tǒng)運行狀況,在某一時刻加入干擾信號,并將比例因子模糊控制嵌入模糊 PID 控制中優(yōu)化算法,對控制系統(tǒng)不斷加以改善與優(yōu)化。試驗結(jié)果表明,此方法比傳統(tǒng) PID 控制更具優(yōu)勢,能有效改善控制系統(tǒng)的響應(yīng)時間、調(diào)節(jié)時間以及抗干擾能力,有效提高控制系統(tǒng)的動態(tài)性能和魯棒性。
關(guān)鍵詞: 伺服控制系統(tǒng); 傳統(tǒng) PID 控制; 模糊自適應(yīng) PID; 比例因子
0、 引言
當(dāng)前智能控制算法的伺服控制系統(tǒng)應(yīng)用較為廣泛,對系統(tǒng)實時性、穩(wěn)定性、抗干擾能力等方面要求較高。伺服控制系統(tǒng)具有非線性及未知性,系統(tǒng)運轉(zhuǎn)過程中常會遇到未知的突發(fā)狀況等干擾,需及時進行自我調(diào)節(jié)并能在有效范圍內(nèi)快速恢復(fù)平穩(wěn)狀態(tài)。陳智勇等采用電流、位置、速度三閉環(huán)的控制方式與電壓矢量調(diào)制控制算法實現(xiàn)伺服控制; 武星等采用多目標(biāo)遺傳算法優(yōu)化伺服控制器的 PID 參數(shù)方法實現(xiàn)伺服控制; S. Kissling采用迭代反饋整定的方式實現(xiàn)對伺服系統(tǒng)的控制參數(shù)進行整定。綜合國內(nèi)外相關(guān)伺服控制算法,各有利弊,應(yīng)結(jié)合實驗背景及應(yīng)用領(lǐng)域?qū)刂扑惴ㄟM行研究。文章提出一種嵌入比例因子的復(fù)合模糊自適應(yīng) PID 控制方法,在廣泛應(yīng)用的模糊 PID 控制算法中嵌入比例因子進行復(fù)合模糊控制。簡單 PID 僅限于數(shù)學(xué)模型精確的控制系統(tǒng),而模糊 PID 控制算法有適應(yīng)非線性和時變性等優(yōu)點,其抗干擾能力強、動態(tài)性能好,且無需精確數(shù)學(xué)模型。控制系統(tǒng)將模糊自適應(yīng) PID 控制與 PLC 結(jié)合,采用模糊自適應(yīng) PID 控制算法對參數(shù)自調(diào)整,通過 PLC 實現(xiàn)模糊自適應(yīng)控制策略,可提升伺服控制系統(tǒng)的響應(yīng)時間、控制精度和平穩(wěn)性。
1 、伺服自適應(yīng)控制系統(tǒng)模型
1. 1 模糊自適應(yīng)
PID 控制算法傳統(tǒng) PID 算法單一,復(fù)雜工況下無法對參數(shù)進行實時自整定。尤其應(yīng)用在特殊環(huán)境下的伺服控制系統(tǒng),例如轉(zhuǎn)運核廢料的智能起重機,在擾動環(huán)境下,系統(tǒng)實時性與魯棒性較差。對模糊自適應(yīng) PID 控制系統(tǒng)而言,需找出 PID 的系統(tǒng)參數(shù) kp、ki、kd與偏差 e 、偏差變化率 ec 間的模糊關(guān)系,通過不斷檢測 e 和 ec 的方式,基于模糊控制原理對 3 個控制參數(shù)調(diào)整,使伺服系統(tǒng)具有良好的動靜態(tài)性能,其系統(tǒng)結(jié)構(gòu)見圖 1。
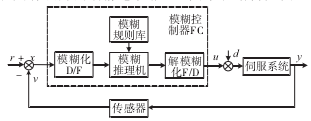
圖 1 模糊自適應(yīng) PID 伺服控制系統(tǒng)框圖
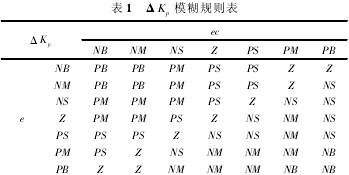
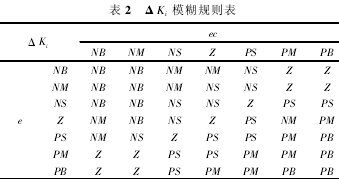
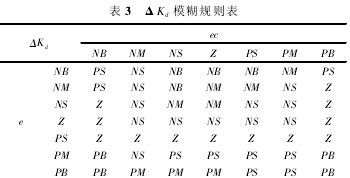
以誤差 e 和誤差變化率 ec 作為輸入,模糊控制自整定參數(shù) ΔKp、ΔKi及 ΔKd作為輸出,將輸入輸出的模糊論域均設(shè)定為{ - 3,- 2,- 1,0,1,2,3} ,則對應(yīng)的模糊子集為{ NB,NM,NS,Z,PS,PM,PB} ,并且采用對稱分布的三角形隸屬函數(shù)。模糊控制規(guī)則是模糊控制器設(shè)計的核心,模糊控制規(guī)則采用如下格式:if E is A and EC is B,then U is CPID 參數(shù)自調(diào)整規(guī)則可總結(jié)為表 1 ~ 表 3。
1. 2 系統(tǒng)模型設(shè)計
以伺服控制系統(tǒng)為對象,采用模糊自適應(yīng) PID 控制算法,通過 PLC 實現(xiàn)對伺服電機的控制。伺服電機分為轉(zhuǎn)矩控制、位置控制和速度控制等模式,考慮各方式特性,結(jié)合系統(tǒng)的功能需求,選取合適的控制模式。基于位置控制模式,通過 PLC 輸出對應(yīng)的脈沖信號到伺服驅(qū)動器,需設(shè)置相應(yīng)的增益參數(shù)對數(shù)據(jù)進行關(guān)系轉(zhuǎn)換。基于圖 1 伺服控制系統(tǒng)框圖,建立如圖 2 所示的系統(tǒng)仿真模型,并將傳統(tǒng) PID 控制與模糊自適應(yīng) PID 控制并行試驗,分別對系統(tǒng)的響應(yīng)特性、超調(diào)量、調(diào)節(jié)時間、平穩(wěn)性等方面進行比較分析。比例系數(shù)可加快系統(tǒng)的響應(yīng)速度,減小系統(tǒng)穩(wěn)態(tài)誤差; 積分系數(shù)可消除系統(tǒng)的穩(wěn)態(tài)誤差,但太大會在響應(yīng)過程的初期產(chǎn)生積分飽和; 微分系數(shù)可改善系統(tǒng)的動態(tài)特性,若過大則會延長調(diào)節(jié)時間,從而降低系統(tǒng)的抗干擾性。總結(jié)對應(yīng)的特性與優(yōu)劣,并依據(jù)試驗結(jié)果,結(jié)合工程中實際運用條件,對系統(tǒng)不斷進行優(yōu)化改善,使此控制系統(tǒng)達到較為良好的控制效果。
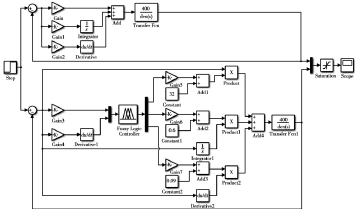
圖 2 系統(tǒng)初步仿真模型圖
建立系統(tǒng)模型,并對其進行仿真實驗,仿真過程中需要對各環(huán)節(jié)的增益、常數(shù)修正值等系統(tǒng)參數(shù)進行對應(yīng)調(diào)整,其中 PID 的主要參數(shù) kp、ki和 kd對系統(tǒng)平穩(wěn)性、穩(wěn)態(tài)精度和超調(diào)量等控制性能指標(biāo)均有重要影響。從系統(tǒng)的動靜態(tài)綜合性能角度考慮,在不同的誤差 e和誤差變化率 ec 狀況下,控制過程對參數(shù)自整定也會有不同的要求,常常參考實際工程經(jīng)驗總結(jié)出的參數(shù)自整定原則,并結(jié)合誤差 e 和誤差變化率 ec ,可根據(jù)系統(tǒng)的響應(yīng)速度、震蕩程度、趨于穩(wěn)定的時間長短等等實際運行狀況,進行參數(shù)自整定調(diào)整。參數(shù)自整定的取值較大較小是針對對應(yīng)參數(shù)初始值而言,在實際應(yīng)用中 PID 參數(shù)是基于其初值而自調(diào)整得出,即:
1. 3 系統(tǒng)模型優(yōu)化
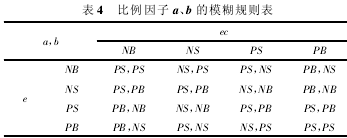
根據(jù)建立的系統(tǒng)仿真模型試驗,經(jīng)過不斷的調(diào)試使控制系統(tǒng)的響應(yīng)速度、超調(diào)量、穩(wěn)定性等指標(biāo)逐漸達標(biāo),可達到較好的控制效果。但是在實際工程運用中,系統(tǒng)時常會出現(xiàn)不定時干擾或負載發(fā)生變化等未知狀況,因此需要對系統(tǒng)進一步優(yōu)化與改善。廣泛應(yīng)用于工業(yè)領(lǐng)域的伺服控制系統(tǒng)應(yīng)具有高精度與良好的實時性,則需要將控制率的計算量盡可能減小,并在一定條件下,對外界未知擾動應(yīng)滿足較好的魯棒性。因此,通過嵌入比例因子的模糊控制,在線修正比例、微分環(huán)節(jié),對系統(tǒng)進一步進行優(yōu)化。在未知擾動、負載發(fā)生變化或啟動誤差較大時,會使誤差 e 發(fā)生一定的跳變,嵌入比例因子的模糊控制環(huán)節(jié)進行自我調(diào)節(jié),使系統(tǒng)快速響應(yīng)并跟蹤其參考信號,從而改善系統(tǒng)的魯棒性與動態(tài)性能。在運行各階段,系統(tǒng)對比例因子的需求并不相同,根據(jù)系統(tǒng)的運行狀況對控制量在線整定,可大大改善系統(tǒng)的控制效果,比例因子a、b 的模糊控制規(guī)則見表 4。
2 、仿真與分析
模擬仿真時,控制系統(tǒng)在無擾動環(huán)境下,選取仿真時長 t = 100s ,對控制系統(tǒng)以傳統(tǒng) PID 控制與模糊自適應(yīng) PID 控制兩種控制方式進行并行試驗,分別對其進行比較、分析以及調(diào)試,使運行結(jié)果達到較為滿意的效果,系統(tǒng)運行曲線如圖 3 所示,其局部放大示意圖見圖 4.
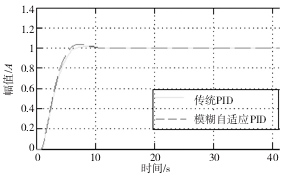
圖 3 理想型系統(tǒng)運行曲線圖.
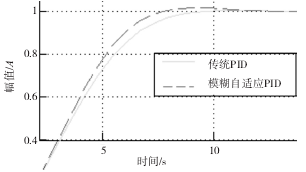
圖 4 理想型系統(tǒng)運行曲線局部放大示意圖
從上圖系統(tǒng)運行曲線可知,兩種 PID 控制方式下系統(tǒng)性能都較好,二者均能快速趨于平穩(wěn),減少對應(yīng)的調(diào)節(jié)時間。雖然傳統(tǒng) PID 控制比模糊自適應(yīng) PID 控制平穩(wěn)且沒有超調(diào)量,但是模糊自適應(yīng) PID 控制在具有更快的響應(yīng)速度下也能快速趨于平穩(wěn),若在系統(tǒng)運行可靠環(huán)境下更能提高系統(tǒng)工作效率。
2. 2 優(yōu)化型復(fù)合模糊自適應(yīng)
PID 控制在實際環(huán)境下,難以避免出現(xiàn)負載變化等擾動現(xiàn)象。因此,模擬真實環(huán)境下,考慮干擾因素,在某一時刻對系統(tǒng)加入干擾信號,并對模糊自適應(yīng) PID 控制與比例因子結(jié)合進行復(fù)合模糊控制。
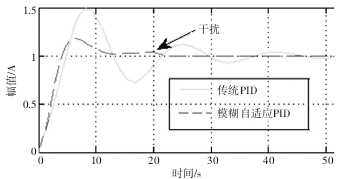
圖 5 優(yōu)化型系統(tǒng)運行曲線圖
選取仿真時間 t = 100 s,對系統(tǒng)分別采用傳統(tǒng)PID 控制與模糊自適應(yīng) PID 復(fù)合控制進行試驗,系統(tǒng)運行曲線圖如圖 5 所示。根據(jù)圖 5 系統(tǒng)運行曲線,傳統(tǒng) PID 控制下系統(tǒng)的響應(yīng)速度較慢,會產(chǎn)生較大超調(diào)量,在一段時間內(nèi)震蕩劇烈,系統(tǒng)反應(yīng)速度較慢,且調(diào)節(jié)時間更久,系統(tǒng)的魯棒性較差。在 t = 20 s 時加入擾動,雖在短時間內(nèi)模糊自適應(yīng)控制下系統(tǒng)也會產(chǎn)生較小的超調(diào)量,但系統(tǒng)響應(yīng)較快,能快速檢測到干擾并能及時進行自我調(diào)整,幾乎能在 2s 內(nèi)快速趨于平穩(wěn),且沒有過于明顯的震蕩,能有效提高系統(tǒng)的動態(tài)性能,使系統(tǒng)的控制效果更佳,其局部示意圖見圖 6、圖 7。
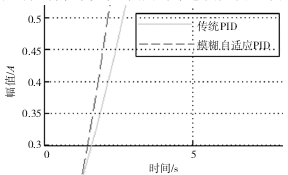
圖 6 快速響應(yīng)局部示意圖
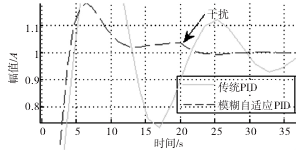
圖 7 抗干擾局部示意圖
3 、總結(jié)
模糊自適應(yīng) PID 復(fù)合控制方法對于受控系統(tǒng)一方面無需具備準(zhǔn)確的數(shù)學(xué)模型,另一方面也可對參數(shù)進行自調(diào)整。文章在 MATLAB/Simulink 系統(tǒng)工具下,基于模糊 PID控制算法,并且分別在傳統(tǒng) PID 控制、模糊 PID 控制以及改進后的復(fù)合模糊自適應(yīng)控制環(huán)境下,對自適應(yīng)伺服系統(tǒng)進行模擬試驗、分析與優(yōu)化。試驗結(jié)果表明,模糊自適應(yīng)PID 控制算法具有良好的控制效果,能有效改善系統(tǒng)的響應(yīng)速度,縮短調(diào)節(jié)時間以及增強系統(tǒng)的抗干擾能力,可有效改善系統(tǒng)的動態(tài)性能和魯棒性。此外,在工程應(yīng)用中亦可提高自適應(yīng)控制系統(tǒng)的可行性,使控制系統(tǒng)更具智能化,具有重要的應(yīng)用價值。
投稿箱:
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年5月 新能源汽車銷量情況
- 2025年5月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年5月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年5月 軸承出口情況
- 2025年5月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年5月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年4月 新能源汽車銷量情況
- 2025年4月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年4月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年4月 軸承出口情況
- 2025年4月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年4月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年1月 新能源汽車銷量情況