



數控車削凸輪時刀具實時擺動角度控制的宏程序應用研究
2018-9-20 來源:湖南汽車工程職業學院 機電工程系 作者:洪美琴
摘 要:車削凸輪時刀具工作角度要保持恒定不變,為此刀具在車削過程中需要繞回轉中心擺動一定的角度。文中根據刀具擺動轉角的計算公式,利用數控宏程序及數控系統變量實現刀具擺動角度的實時計算,并利用旋轉軸指令 A #1 作為控制信號來實時控制伺服電機的轉動,以實現刀具工作角度恒定不變的目的。
關鍵詞:擺動角度;變量;系統變量;宏程序
0、引 言
車削凸輪時,刀具根據凸輪輪廓的變化作高速往復移動的同時還要擺動一定的角度以修正補償刀具工作角度變化,使車削過程中刀具的工作角度保持恒定值,如圖1 所示。切削過程中凸輪隨主軸轉動,刀具往復移動的同時繞回轉中心擺動 α 角,在切削凸輪輪廓曲線的不同部位時,車刀切削點的法線始終通過刀具的回轉中心,確保車刀刀尖的切削點與刀具回轉中心的連線在切削點的法線 n-n上,因而使車削過程中刀具工作角度恒定不變,使凸輪始終在合理狀態下切削。由車削時刀具與凸輪的幾何位置關系可以得出,刀具相對于被加工凸輪的運動軌跡相當于滾子對心從動件平面凸輪機構運動狀態,如圖 2 所示。
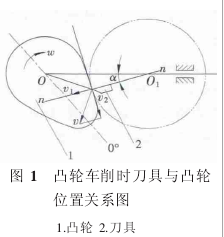
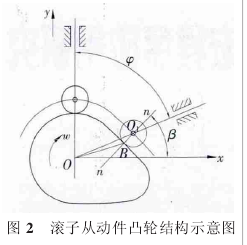
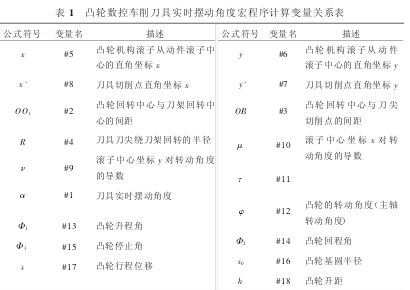
圖 2 中凸輪的滾子中心可假設成刀具回轉中心,刀具回轉中心點即為滾子對心從動件的理論廓線上一點,B 點為滾子與凸輪的切點,為凸輪實際廓線上的一點,也即刀具的切削點,刀具的回轉半徑相當于滾子半徑。圖 2 中 O 為凸輪的回轉中心,∠OO1B 為凸輪的瞬時壓力角。經圖 1 與圖 2 比較,凸輪的瞬時壓力角與刀具擺動補償角度值相等,即與刀具實時擺動角度 α 相等。車削時根據凸輪輪廓實時計算切削點的刀具擺動角度值,此值作為控制信號控制伺服電機轉動對應的角度,從而控制刀具的轉角以達到車削時刀具保持恒定前、后角的目的。
1 、刀具實時擺動角度的計算分析
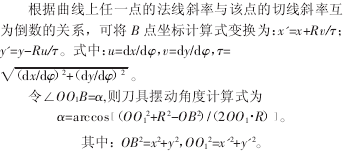
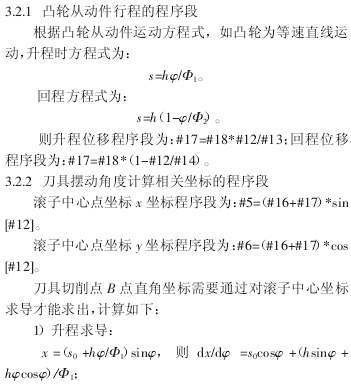
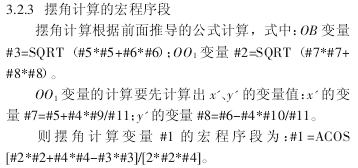
車削凸輪時刀具工作角度保持不變,其刀尖繞回轉中心回轉而擺動相應的角度。刀具擺動的角度相當于凸輪的瞬時壓力角,與∠OO1B 相等,因此可根據圖 2 來計算。圖 2 中滾子中心 O1點的坐標計算式為 :x=(s0+s)·sinφ;y=(s0+s)cosφ 。式中:x、y 為滾子中心點坐標;s0為凸輪的基圓半徑;s 為凸輪的行程距離;φ 為凸輪的轉角。B 點直角坐標計算式為:x'=x-rccosβ;y'=y -rcsinβ。 式中:x'、y'為 B 點的坐標;rc為滾子半徑,相當于刀具切削點到回轉中心的距離 R;β 為法線 n-n 與水平線的夾角。
2 、刀具擺動角度實時計算的數控系統變量選擇
從刀具擺動角度計算式推導過程可知實時擺動角度值 α 與凸輪的轉角即主軸的轉角 φ 成函數關系,所以需要獲得主軸的實時轉角來計算刀具的擺動角度值,為此選用數控系統的系統變量來實時獲得主軸轉角信息,通過宏程序來實現實時計算。數控系統變量能夠獲取包含在機床處理器或 NC內存中的只讀或讀/寫信息,包括與機床處理器有關的交換參數、機床狀態參數、加工參數等系統信息。實現凸輪的數控車削加工,通過宏程序利用數控系統旋轉軸功能來控制伺服電機轉動來控制刀具的擺動角度,同時加工中要實時讀取主軸位置信息,需要選用帶三軸、四軸功能的數控系統的數控車床。由于選用的機床具有伺服電機主軸功能,因而可以利用主軸位置信息 數 控 系 統 變 量 直 接 讀 取 主 軸 位 置 信 息 。 如FANUC0i -TD 數控系統,根據 FANUC 0i -D 系統變量的設定,位置信息中當前指令位置機床坐標系下的系統變量為 #5021~#5025,#5021、#5022 對應第一軸、第二軸,即 2 個基本軸 X、Z 軸系統變量,#5023 則對應為主軸當前位置的系統變量,應用 #5203 變量就能直接得到凸輪的實時轉角 φ 值。
3 、宏程序編程分析
刀具擺動角度計算除與凸輪的轉角 φ有函數關系外,還與凸輪行程s有函數關系,而凸輪的行程也與凸輪的轉角有函數關系。因此根據上述公式計算刀具擺動角度值時,首先要根據凸輪從動件運動規律方程式來計算 s值。對于不同的凸輪輪廓只要改變從動件運動方程式,運用基本相同的宏程序即可實現刀具實時擺動角度的計算和擺角指令控制信號的輸出。
3.1 刀具實時擺動角度宏程序編程的變量定義
宏程序的相關變量的確定是依據計算刀具擺動角度的公式來定義,如刀具的擺動角度、凸輪回轉角度即主軸轉動角度、凸輪從動件行程等,具體變量參數如表 1 所示。
3.2 宏程序程序段設計
刀具擺動角度計算與凸輪的轉角即主軸的轉角有關,凸輪轉角 φ 的變量 #12 由主軸位置信息系統變量#5023 來定義,即 #12=#5023。

4、 刀具擺動角度的宏程序設計
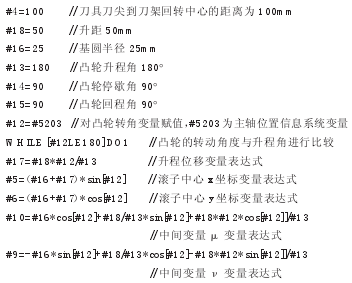
計算刀具擺動角度的宏程序計算的變量可以分為已知量,如凸輪運動方程中升距、停止角、升程角、降程角及基圓半徑,車削刀具刀尖到刀架回轉中心的距離。對這些變量直接賦值。以一個實際凸輪為例來編寫宏程序。該凸輪順時針轉過 180°時,從動件上升 50mm;當凸輪接著轉過 90°時,從動件停歇不動;當凸輪轉過剩余 90°時,從動件返回原處。O1328(子程序)
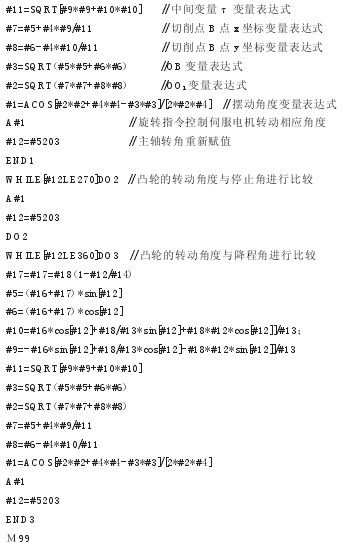
程序段中 A 為第四軸地址字,A#1 指令控制伺服電機轉動對應的角度,以實時控制刀具的工作角度,使其保持恒定值。
5 、結 論
刀具工作角度要保持恒定值是數控車削凸輪時要解決的一個關鍵問題,車削時刀具要繞刀架回轉中心擺動一定的角度,擺動值要隨凸輪輪廓變化實時計算出來。選用高端數控系統如 FANUC 0i-D 的數控機床,利用數控系統主軸位置信息系統變量實時讀取主軸的轉角,通過宏程序實現刀具擺動角度的實時計算,同時旋轉軸指令作為控制信號控制伺服電機轉動,不僅解決了實時計算并能實時輸出旋轉角度指令 A#1的難題,還能實現不同的凸輪輪廓只要改變凸輪運動條件參數賦值均可采用宏程序進行實時計算輸出控制指令 A#1,以實時控制刀具擺動的角度,適應性強,應用范圍廣.
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

