



機器人的運動軌跡插值方法研究與分析
2016-12-5 來源:陜西理工學院陜西省工業自動化重點實驗室 作者:趙川 張鵬超 潘曉磊 呂海立
軌跡規劃對工業機器人能夠高效、穩定的運動有重要的影響。機器人工作時必須保證運行軌跡的平滑。若各關節的速度和加速度突變或者不連續會在機器人工作過程中,加劇機構的摩擦,機械臂出現振動現象,增大軌跡跟蹤誤差,降低跟蹤精度,縮短機器人的使用壽命。為此學者們提出了多項式插值、B樣條曲線插值等插值方法,從而得到關節速度和加速度平穩、光滑且連續的軌跡。
本文通過在MATLAB環境中仿真研究了三次多項式與五次多項式插值后,各關節的關節角度位置、速度和加速度的變化軌跡,通過研究分析提出了過路徑點的點到點運動間的“353”∽1多項式插值,并且得到了關節速度和加速度的平滑連續的變化軌跡。
1.機器人運動學模型
本文以NACHI的六自由度MZ07工業機器人作為模型研究,確定機器人的連桿D—H坐標參數,如表1所示,在MATLAB中構建機器人的數學模型,如圖1所示。
表1 MZ07機器人連桿D—H參數
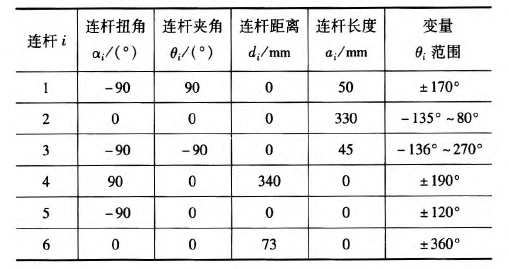
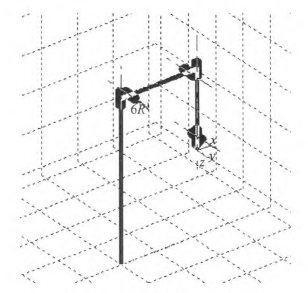
圖1機器人MATLAB=維模型
2.關節空間軌跡插值研究
關節空間法是以含有關節角度的函數來描述機器人的軌跡,在進行關節空間軌跡規劃時,需要通過運動學的逆解,將路徑點轉換成關節矢量角度值,再通過對每個關節擬合一個光滑函數,使從起始點開始,依次通過所有路徑點,最后到達目標點。對于每段路徑,每個關節運行時間均相同,則保證了所有關節同時到達路徑點和目標點,此外,各個關節函數之間是相互獨立存在的。采用關節空間法不需要在直角坐標系中描述兩個路徑點之間的路徑形狀,所以計算簡單、容易,并且關節空間不會發生在直角坐標空間中的機構奇異性問題。
2.1過路徑點的三次多項式插值
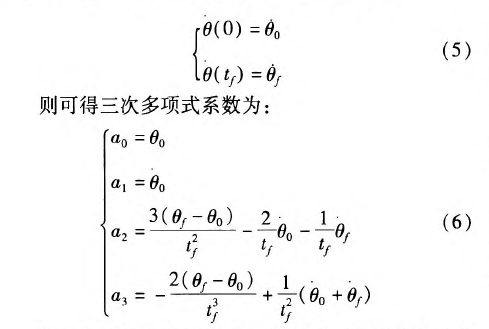
在單個關節運動過程中,為了使其能都平穩地運動,要求關節在起始點速度和目標點速度均要為0,而且關節起始角吼已知,終止點所可由運動學反解求得,則一個三次多項式可由起始點的關節角度、速度和終止點的關節角度、速度4個約束唯一確定。因此對三次多項式:
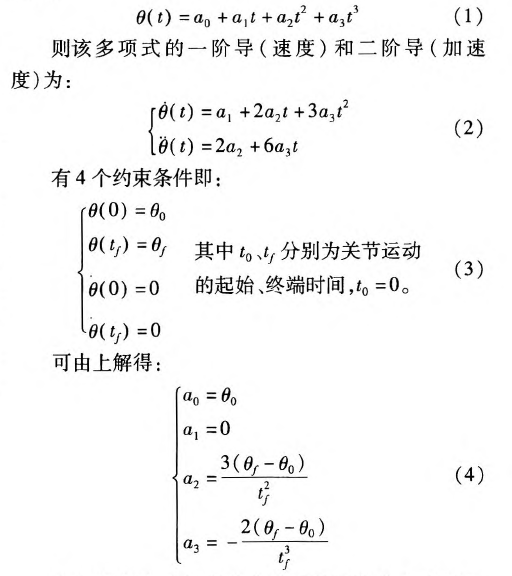
由上確定的三次多項式的系數可以代人式(1)、(2)中,分別可以得到單個關節此時刻的的關節角度、關節速度以及加速度。
但是在現實應用中,要求規劃出過路徑點的軌跡,然后在經過路徑點時的機器人手臂末端狀態會有兩種情況:一種情況是機器人手臂由起始點運動到路徑點時停留,即此時的在路徑點處的速度為零,則可以直接使用前面的三次多項式插值算法;另一種情況是機器人手臂由起始點運動到路徑點時不做停留,此時的速度已經不再為零,則該點再運動到目標點或者下一個路徑點時,不能采用前面的三次多項式算法,故上式需要推廣成為具有任意約束速度的三次多項式插值。在過路徑點的軌跡中,可以把所有的路徑點看做是“起始點”或者“目標點”,通過求解其逆解,得到各關節的關節矢量值,然后確定一個三次多項式插值函數,使各個路徑點平滑地連接起來。只是此時的“起始點”與“目標點”處的速度不再為零。在確定此三次多項式的方法與前面所述方法相同,只是改變了速度約束,即:
對于各路徑點處的關節速度,我們采用平均值法來確定,規定各路徑點間的運動時間均相等,路徑點速度可根據兩側的軌跡的角速度取平均值。如果對于運動軌跡的要求更加嚴格,則需要更高階的多項式對運動軌跡進行插值。但不是階數越高越好,高階多項式軌跡會出現“龍格”現象。本文針對五次多項式進行研究。五次多項式可由6個約束唯一確定,即在起始點和目標點規定了關節位置、速度和加速度,從而來約束整個運動軌跡。五次多項式即:
2.3仿真研究
在MATLAB中對MZ07機器人的運動進行軌跡規劃仿真,設有起始點A(一100,0,一300)、中間點曰(325,225,100)和目標點C(235,300,400)。從A點運動到B點用時1 s,從B點到c點用時1 S,求得三點的關節變量值,如表2所示。
表2軌跡點的關節角度

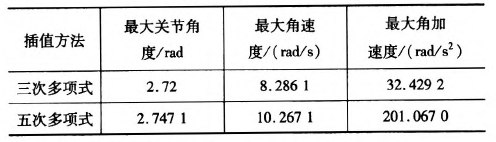
假定該運動的起始點與目標點的速度與加速度均為零。分別對該三點間的運動應用三次多項式插值和五次多項式插值,分別得到該過程中關節角度、速度和加速度的變化情況,如圖2~7所示,三次多項式與五次多項式插值后的關節角度、角速度和角加速度的產生的最大值如表3所示。
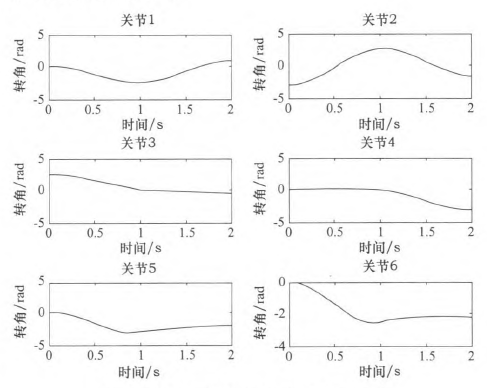
圖2三次多項式規劃后關節i一6角度位置
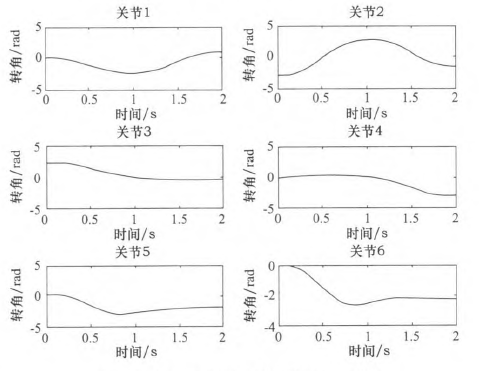
圖3五次多項式規劃后關節卜6角度位置
由仿真結果可知,三次和五次多項式都可以使運動軌跡平滑連續,但是三次多項式插值后,在關節加速度上出現突變,現實中機器人手臂在運動中很可能無法完成此運動過程。五次多項式的加速度雖然可以光滑地連續起來,但是最大角加速度達到-j'201.067 0rad/s2,使運行不夠平穩緩和,也有害電動機的壽命。
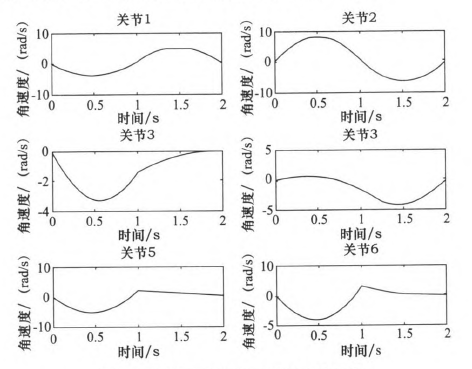
圖4 三次多項式規劃后關節1~6角速度
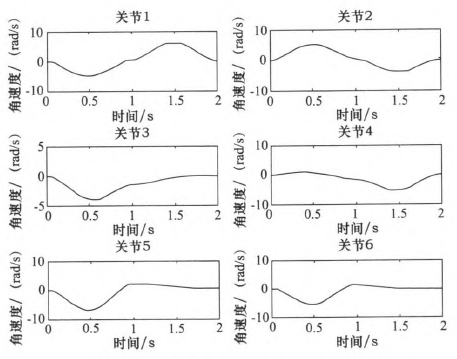
圖5 五次多項式規劃后關節1~6角速度
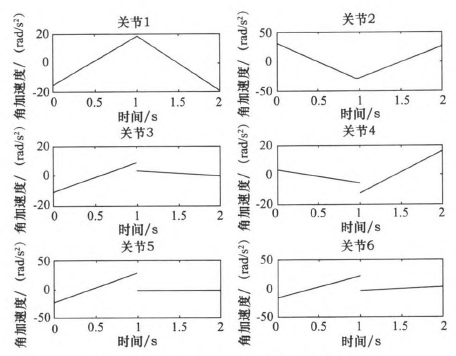
圖6三次多項式規劃后關節1-6角加速度
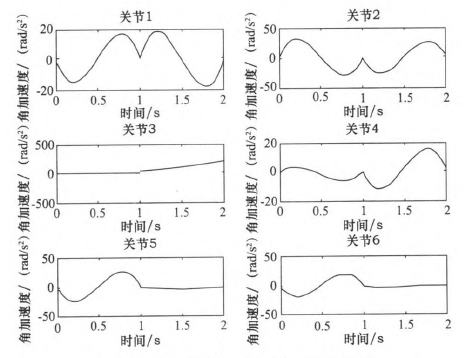
圖7五次多項式規劃后關節1~6角加速度
表3三次多項式與五次多項式最值比較
2.4過路徑點的“353”[gj多項式插值。
在實際對機器人運動軌跡規劃時,要求規劃過路徑點的軌跡,為了得到加速度合適且連續、平滑的變化軌跡,介于三次多項式和五次多項式的優缺點,采用了“353”一1多項式插值,即三次多項式與五次多項式結合的形式。如圖8所示,該方法將整個軌跡分為3個階段,第一階段為在0一t。時間內采用三次多項式插值,第二階段t。一t。時間內采用五次多項式插值,第三階段t。一t,時間內采用三次多項式插值。本結構方法的要求,在兩個相鄰階段的交點處的關節角度、角速度和角加速度要求相等。其中t。、t6可分別取0一t^、t^一f,時刻的中間時刻。
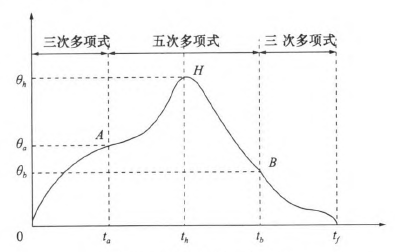
圖8“353”多項式結構
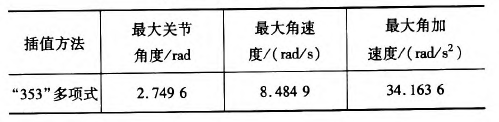
同樣使用2.3節假定的A、B、c三點。在MATLAB中仿真出“353”多項式結構算法規劃后的各關節的關節角度、角速度和角加速度變化情況,如圖9—10所示。規劃后的關節角度、角速度和角加速度的最大值如表4所示。
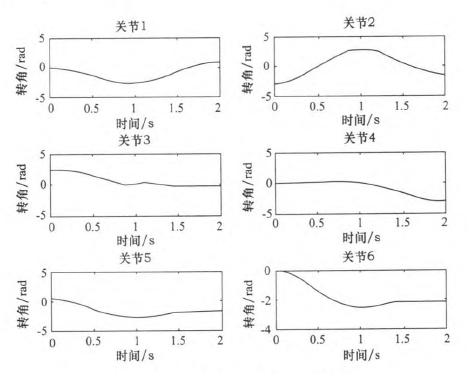
圖9 "353”多項式關節角度
根據仿真結束所示,該方法可以得到平穩、連續的關節角度、角速度和角加速度的變化軌跡。與表3中的三次、五次多項式最大值比較,可以看出相對三次多項式可以得到平穩、連續的角加速度,同時相對五次多項式可以得到比較小的最大關節角加速度,從而使整個關節運動過程中更加平滑,減小了機構間的沖擊。
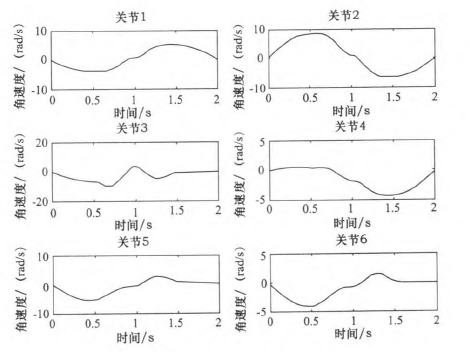
圖10 “353”多項式關節角速度
表4“353”多項式最值
3.結語
本文通過在MATLAB環境中,基于MZ07工業機器人運動模型,分析了三次多項式和五次多項式的軌跡插值算法,對比了兩個方法的優缺點。關節空間在“353”多項式插值規劃后,通過仿真研究,“353”多項式插值既可以得到平穩、連續的角加速度軌跡,又可以得到較合適的最大角加速度,解決了三次多項式插值后關節角加速度不連續問題和五次多項式插值規劃后關節最大角加速度較大問題。在關節空間中多項式插值的高低次結合使得各關節的變換優于單一使用的同次多項式插值。
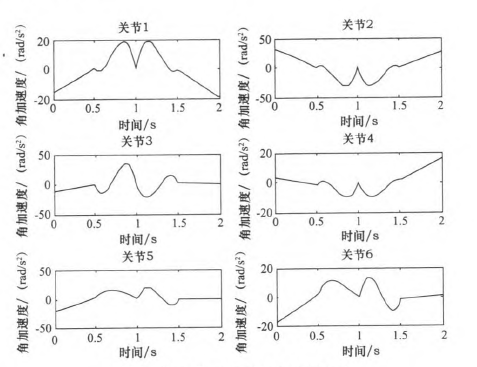
圖11 “353”多項式關節角加速度
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com

