



振動驅動移動機器人直線運動的滑移分岔
2017-3-1 來源:同濟大學航空航天與力學學院 作者:陳祺 占雄 徐鑒
摘要:近年來,隨著移動型機器人設計技術水平的不斷提高,其運動形式日趨多樣. 借助于仿生學的思想,模仿蚯蚓等動物的蠕動成為不少機器人設計者所追求的目標. 為了實現這一目標,學者們提出并研究了振動驅動系統. 本文研究了各向同性干摩擦下,單模塊三相振動驅動系統的粘滑運動. 考慮到庫倫干摩擦力的不連續性,振動驅動系統屬于Filippov 系統. 基于此,運用Filippov 滑移分岔理論,分析了振動驅動系統不同的粘滑運動情況. 根據驅動參數的不同,系統運動的滑移區域被分成4 種基本情形. 對這些情形分類討論,得到系統的6 種運動情況. 然后對這6 種運動情況進行歸納,最終得出系統一共存在4 種不同的粘滑運動,而且也解析地給出了發生這4 種粘滑運動的分岔條件. 分岔條件包含系統的3 個驅動參數,通過變化這些參數,得到了系統運動的分岔圖. 借助分岔圖,詳細分析了隨著驅動參數的變化,系統如何實現不同粘滑運動類型之間的切換,并從分岔角度給出了相應的物理解釋. 最后,通過數值方法直接求解原運動方程,數值解法得到的4 種運動圖像與理論分析一致,驗證了系統運動分岔研究的正確性.
關鍵詞:振動驅動系統,三相驅動,各向同性干摩擦,分岔
0.引言
眾所周知,蚯蚓等軟體動物通過蠕動實現運動,這種運動形式看似簡單,卻憑借其一大優勢——無足,吸引了眾多學者的關注[1-6]. 受此啟發,一類新型的運動模型——振動驅動系統,近年來得到了廣泛的研究[7-25]. 這種運動模型繼承了蚯蚓運動的優勢—— 不需要外部驅動部件,如腿或輪子,因此易于實現結構的微型化,密封化. 可以預見,基于振動驅動這一思想的機器人能更好地適應多種環境,甚至有學者期望將其制成微型膠囊機器人進入人體腸道甚至血管中治療疾病.
2005 年,Chernousko[7] 研究了兩個質量塊系統的直線運動,通過選擇合適的物理參數并合理地控制兩個質量塊之間的相互作用力,實現了該系統的最快平均速度. 在此基礎上,其首次提出了由一個內部質量塊和一個外部箱型剛體構成的振動驅動系統模型[8]. 在該模型中,內部質量塊相對于外部箱體做周期運動,通過合理設計內部質量塊的周期運動形式,外部箱體可以在內部質量塊對其作用力以及支撐面對其摩擦力的共同作用下,實現周期平移運動. 因而,對質量塊的相對運動形式進行設計和優化以實現系統最大平均速度是該類系統研究的一個關鍵問題. 縱觀之前的研究,質量塊的控制模式大致分為兩類:對稱控制和非對稱控制. 對稱控制意味著內部質量塊的相對運動形式具有對稱性,也更容易實現,比如正弦驅動,但是往往需要環境提供能使系統發生剛體位移的異性摩擦. 2012 年,Fang 等[9] 在研究三模塊振動驅動系統時使用了正弦驅動,他們發現通過優化各模塊中正弦驅動的初始相位差,能夠有效地提高系統的穩態平均速度. 2014 年,Fang等[10] 研究了正弦驅動下,單模塊振動驅動系統的運動,重點從滑移分岔的角度分析了系統的粘滑運動,加深了人們對該類系統粘滑運動的認識. 對稱驅動的研究總的來說并不如非對稱驅動的研究多. 早在2005 年Chernousko[7] 就提出了兩種非對稱驅動模式—— 兩相驅動和三相驅動,對實現振動驅動系統的運動都行之有效. 2006 年,Chernousko[11] 研究了兩相驅動模式,這種驅動模式下,內部質量塊一個周期內的相對運動被分為兩段,每段上的相對運動速度均為常數. 以實現系統的最大穩態平均速度為目標,對兩相驅動參數進行了優化. 2007 年,Chernousko[12] 研究了三相驅動下振動驅動系統的運動. 該種情形下,內部質量塊一個周期內的相對運動被分為三段,每段上的加速度大小為常數. 由于庫倫干摩擦的存在,以及不同時間域內,內部質量塊的相對加速度不同,加上系統速度的不斷變化,因而系統會發生復雜的粘滑運動. 2011 年,Fang 等[13] 運用平均法研究了三相驅動的單模塊振動驅動系統在不存在粘滑效應時的速度. 但是當考慮粘滑效應時,平均法不再適用,根據粘滑運動發生情況,系統運動可以被細分成8 種情況. 2011 年,Fang 等[14] 在研究兩模塊振動驅動系統時,在兩個模塊中也分別施加了這種三相驅動,通過調節兩組振動的相位差實現了系統的較快運動速度. 可見,三相驅動在振動驅動系統的控制中占有重要的地位. 此外,2006 年Li 等[15] 使用的四步驅動以及2011 年Huda 等[16] 使用的四相驅動也屬于非對稱驅動.
除了上文中內部質量塊的相對運動形式以外,另外一個對振動驅動系統的運動行為起很大影響的是系統受到的外部摩擦. 2007 年,Chernousko[12] 研究了非對稱黏性摩擦下振動驅動系統的運動,這種環境模擬了系統在液體環境中的運動. 研究針對振動驅動系統速度進行了控制參數優化,并加以實驗驗證.2009 年,Bolotnik 等[17] 研究了平方阻尼作用下系統的運動情況,這種運動常常在系統運動速度較快、雷諾數較大的環境下發生. 研究表明,在平方阻尼作用下,即使是各向同性的阻力,系統也能實現向前運動. 2011 年,Fang 等[13] 研究了振動驅動系統在非對稱庫倫干摩擦下的運動情況,由于干摩擦存在,觀察到了前面所述的粘滑運動.
事實上,粘滑效應至今為止仍然是振動驅動系統中的一大難題. 一方面,粘滑效應使得運動情況復雜多樣,難以分析,另一方面,充分利用粘滑效應也是提高系統運動性能的重要措施. 粘滑運動往往都是在庫倫摩擦之下發生,這一點,不僅在振動驅動系統中得到體現,而且在其他系統中也有發現并被研究[18;26-28]. 庫倫摩擦之所以能引起粘滑運動,是因為其不連續性. 從運動狀態場的角度看,這種由摩擦力引起的不連續系統,是一類典型的Filippov 系統[29-30],而Filippov 系統最突出的就是利用滑移和滑移分岔理論巧妙地分析系統中的不連續性對運動的影響. 2010 年,Guardia 等[26]通過滑移分岔理論研究了一個干摩擦下的彈簧振子,研究證實系統存在兩參數滑移分岔,并得到了其中一條余維一分岔曲線的解析表達式. 2007 年,Kowalczyk 等[27] 也通過Filippov 系統模型研究了干摩擦下的彈簧振子,發現了系統中的余維二分岔,并解釋了可能發生的混沌現象. Filippov 系統理論為研究干摩擦下的彈簧振子這類系統行為,提供了重要的分析方法[18;26-28]. 受此啟發,2011 年,Fang 等[10] 也利用Filippov 系統描述了非對稱干摩擦下受正弦驅動的振動驅動系統,首次從滑移分岔角度闡明了粘滑效應下系統的運動情況,優化結果顯示,合理優化系統驅動參數和摩擦系數,能實現系統無后退移動.
回顧振動驅動系統十年來的研究[7-25],無論是內部驅動的設計,還是外部阻力的分類,抑或是研究方法的選用,都得到了長足的發展. 值得注意的是,絕大部分研究更多地是關注了摩擦力為各向異性時的情況,而對于同性摩擦的情形討論較少. 因此,本文重點研究了各向同性干摩擦下的振動驅動系統的運動. 由于摩擦的各向同性,本文中將采用三相驅動這一非對稱驅動以保證系統定向移動的實現. 此外,干摩擦條件下,系統的不連續性會誘發粘滑運動,這種運動的復雜性也對研究工作形成了挑戰. 借助分岔理論可知,本文中所考慮的振動驅動系統也是Filippov 系統,因此可以從滑移分岔的角度對系統的運動進行分類. 這種分類有效地揭示了各向同性干摩擦下振動驅動系統多樣的運動行為,對參數的設計起到一定的指導作用. 最后,我們用數值方法對理論分析得到的運動分類以及運動特性進行了驗證.
1.振動驅動系統
1.1 動力學方程
振動驅動系統的基本模型如圖1 所示. 系統由兩個部分組成,分別為質量為M 的剛性箱體以及質量為m 的內部質量塊. 由前人的工作可知,通過m相對于M 的特定振動,可以實現系統在水平直線上的定向移動,由此稱其為振動驅動系統. 易知,系統有兩個自由度,因而可以取兩組獨立的廣義坐標,

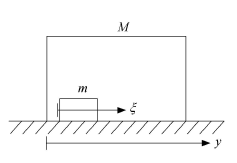
圖1 振動驅動系統
由牛頓第二運動定律,可得運動方程
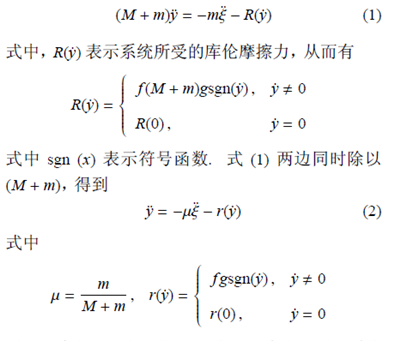
需要注意的是,上面的R(0) 表示速度為0 時,系統所受的摩擦阻力. 因此,如果內部振動提供的驅動力不足以克服庫倫摩擦,那么摩擦力就與該力等大反向,維持系統靜止狀態. 如果內部振動提供的驅動力大于最大靜摩擦力,那么系統有運動的趨勢,此時摩擦力的大小就是最大靜摩擦力. 為了簡便分析,本文中最大靜摩擦力近似認為等于滑動摩擦力. 所以有
式(2) 和式(3) 是振動驅動的基本力學模型.
1.2 三相驅動
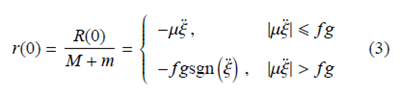
假設箱體內允許質量塊運動的區間長度為L
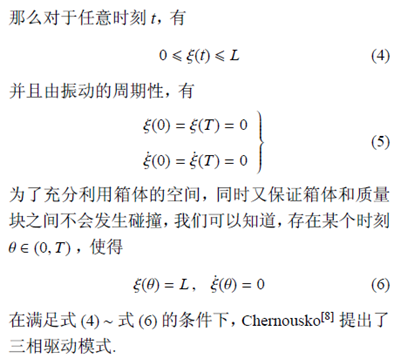
三相驅動模式的基本思想是將內部質量塊一個周期的相對振動在時間上分為三段,三段區間的長度分別為r1, r2, r3. 并且,在每段時間區間內,質量塊m 相對于M 均做勻變速直線運動,由式(5)r 式
(7) 易知,第一、三段中m 相對運動的加速度為正常數,第二段中m 相對運動的加速度為負常數. 一個周期內,m 相對運動的數學表達式如下
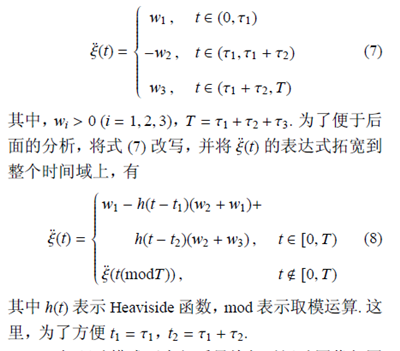
三相驅動模式下內部質量塊相對運動圖像如圖2 所示.
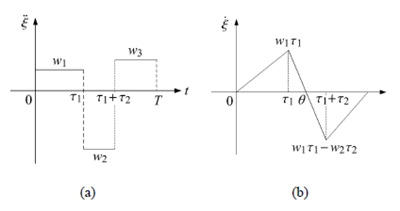
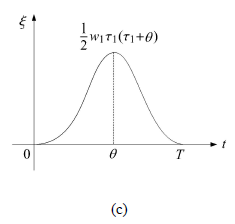
圖2 三相控制模式下m 的(a) 相對加速度、(b) 速度和(c) 位移
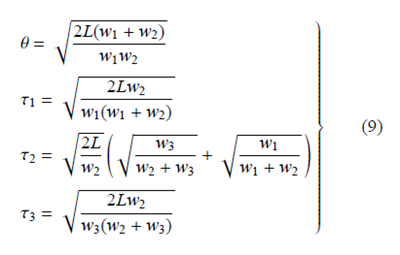
三相驅動中,獨立的控制變量有3 個,本文使用wi(i = 1; 2; 3) 作為控制的自變量. 當一組wi(i = 1; 2; 3)選定以后,其他的變量可以根據式(4)~式(6) 導出,分別為
1.3 Filippov 系統
振動驅動系統的運動情況不僅取決于內部質量塊的相對振動,而且與其所受的外部阻力有關. 本文中系統所受的阻力為庫倫干摩擦,干摩擦的復雜性在于其不連續性,即當系統速度方向改變時,摩擦力的變化是階躍的. 因此,就其本質而言,本文所研究的系統,也就是式(2) 和式(8) 所決定的振動驅動系統,是一種右端不連續的微分方程系統. 這種不連續的復雜性體現在力學現象上,就是系統會發生粘滑運動,而這種特殊的運動模式又讓傳統的分析方法顯得無能為力. 為了更好地從數學上描述運動方程,以及從力學角度更好地解釋各種運動情形的發生,本文采用Filippov 系統的相關理論分析振動驅動系統. 這樣做的好處是,Filippov 滑移分岔理論能有效地解釋振動驅動系統中的粘滑效應. 需要注意的是,Filippov 系統中所謂的滑移運動,其實就對應了振動驅動系統粘滑運動中的黏滯狀態.
采用Filippov 系統分析的步驟是:建立系統一階狀態微分方程;確定滑移區域;具體討論在滑移區域的邊界是否發生滑移分岔. 當然,由于本文中采用的驅動是三相驅動,本身也存在不連續現象,所以這又增加了分析的復雜性. 基于此,文中通過分類討論,將振動驅動系統中可能發生的各種滑移分岔現象進行了詳細的羅列、歸納.
具體地,我們首先將(2) 式由二階非自治系統轉化為一階自治系統,即將t 作為狀態變量,引入變量替換,令

式中,Hx = 0 是x 的法向量.
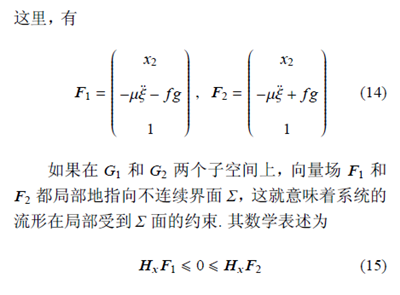
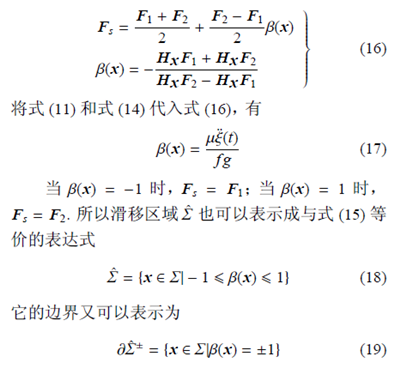
分界面上滿足這一條件的區域稱為滑移區域(sliding region),記為? Σ. 系統只有在滑移區域上,才會發生滑移運動,也就是出現黏滯狀態.根據Utkin 等效控制理論,滑移區域上的運動由兩個部分構成. 一個是F1 和F2 的平均值,另一個是控制函數β(x),該函數用來將流形拉回到與滑移區域? Σ相切,這也就保證了系統的運動始終保持在滑移區域上,具體表達式如下
2.運動分析
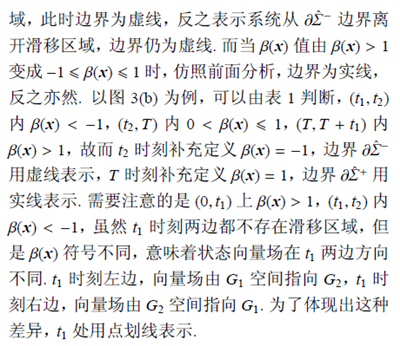
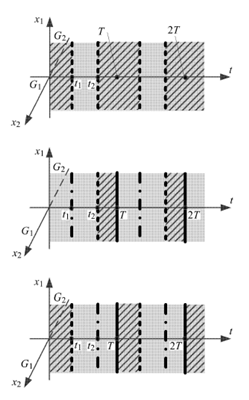
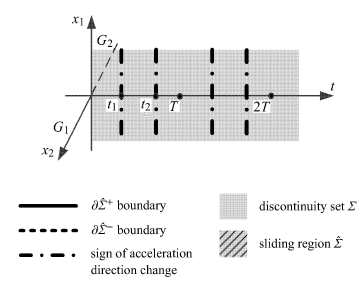
圖3 系統在4 種情形(表1) 下的滑移區域示意圖
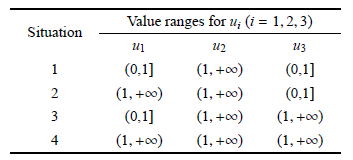
表1 粘滑運動的4 種情形
2.1 情形1
此時,由表1 中的第一行數據,等價地得到

注意到x2(t1) = 0,x2(t2) > 0,也就是可能發生滑移分岔位置的速度符號確定,因而兩點處均不會發生分岔. 此時,系統的運動狀態示意圖對應于圖5(a).
2.2 情形2
注意到x2(t2) > 0,x2(T) = 0,也就是分岔位置處速度的符號確定,因而兩點處均不會發生分岔. 系統的運動狀態唯一,如圖5(b).
2.3 情形3
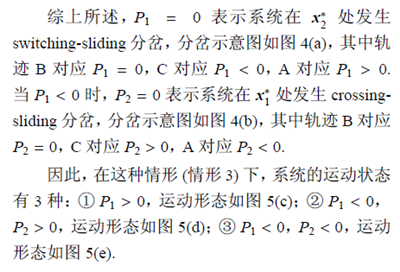
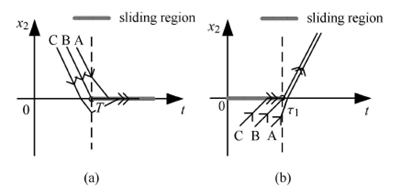
圖4 系統的兩種分岔示意圖
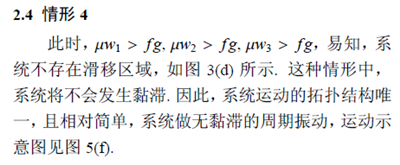

圖5 系統的6 種運動形態
3 分岔
第2 節中通過對系統運動分情形進行分析,觀察到系統運動出現了滑移分岔現象,也得到了6 種形式的粘滑運動. 但是需要注意的是,這并不意味著這6 種運動形式定性上各不相同. 本節將先從滑移分岔的觀點分析上述各運動屬于何種滑移運動類型.然后再具體分析各種不同運動發生的條件,探究隨著參數變化它們之間如何通過滑移分岔實現相互切換.
3.1 歸納
Filippov 滑移分岔理論指出,右端不連續系統在不連續界面上可能會發生4 種滑移分岔(crossingsliding,grazing-sliding, switching-sliding, addingsliding)[29],這4 種分岔的名稱也可以被借用來命名滑移運動的類型. 利用圖3(a),可以看到在圖5(a)中,系統從G1 空間進入滑移區域之后,并不進入G2 空間,而是保持滑移運動直到再次進入G1 空間.可以簡單地理解成系統的運動狀態軌跡擦過滑移區域,因而這種滑移運動稱為grazing-sliding. 同樣可以看到,圖5(c) 中的滑移運動也可以看成是一種grazing-sliding. 這兩種運動形態可以被歸納為同一種滑移運動類型.
觀察圖5(b),并結合圖3(b) 可知,系統由G1 空間進入滑移區域后保持滑移運動至 邊界,然后離開滑移區域,進入G2 空間. 可以簡單地理解為系統的運動狀態軌跡在經過一段滑移運動之后穿越了滑移區域,因而這種滑移運動稱為crossing-sliding.觀察圖5(d),并結合圖3(d) 可知,系統由G1 空間直接進入G2 空間,然后又回到滑移區域. 由G2 空間進入滑移區域后,系統滑移運動至
邊界,然后離開滑移區域,進入G2 空間. 可以簡單地理解為系統的運動狀態軌跡在經過一段滑移運動之后穿越了滑移區域,因而這種滑移運動稱為crossing-sliding.觀察圖5(d),并結合圖3(d) 可知,系統由G1 空間直接進入G2 空間,然后又回到滑移區域. 由G2 空間進入滑移區域后,系統滑移運動至 邊界,最終回到G1 空間. 可以簡單地理解成,系統的狀態軌跡先穿過了不連續界面,然后回到滑移區域繼續運動,對于這樣一個具有來回轉換過程的運動,形象地稱為switching-sliding.圖5(e) 和圖5(f) 屬于同一類運動,且都不發生滑移運動.
邊界,最終回到G1 空間. 可以簡單地理解成,系統的狀態軌跡先穿過了不連續界面,然后回到滑移區域繼續運動,對于這樣一個具有來回轉換過程的運動,形象地稱為switching-sliding.圖5(e) 和圖5(f) 屬于同一類運動,且都不發生滑移運動.
圖5(e) 和圖5(f) 屬于同一類運動,且都不發生滑移運動.綜上,系統存在4 種定性不同的運動類型,其中3種運動中存在黏滯,1種無黏滯發生.
3.2 分岔圖
為了更清晰地描述滑移分岔發生的條件,判斷

由第二節的分析,不難發現,如果知道一個系統ui(i = 1; 2; 3) 的取值,以及P1 和P2 的正負號情況,那么系統的運動狀態可以確定. 從式(26) 和式(27)可以看出,P1 和P2 的正負號情況分別與?P1 和?P2 一致,且最終只取決于ui(i = 1; 2; 3). 故而,系統的運動狀態從根本上講,取決于3 個參數ui(i = 1; 2; 3) 的取值. 由前文分析可知,隨著這3 個參數變化,系統有如下4 種類型的粘滑運動.
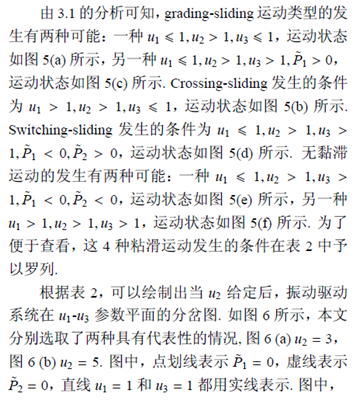
表2 4種粘滑運動的發生條件
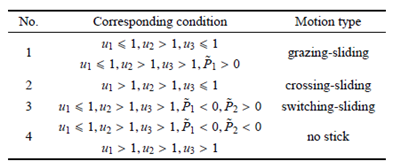


圖6 振動驅動系統在u1--u3 平面的分岔圖
Ri (i = 1; 2; 3; 4) 表示發生不同粘滑運動的區域,下標i 的值與表2 中的序號對應. 對比圖6(a) 和圖6(b),發現圖6(a) 中不存在?P1 = 0 這條線,而圖6 (b) 中存在;相應地,圖6 (a) 中的R1 是1 片區域,而圖6 (b)中的R1 是2 片區域. 由此可知,當u2 的值較小(通過數值計算,觀察到大約u2 < 3:5) 時,?P1 < 0 恒成立,看不到所謂的switching-sliding 分岔,而當u2 的值較大(大約u2 > 3:5) 時,switching-sliding 分岔可能會發生.
當u2 較大時,運動分類情況較為典型也較為豐富. 以圖5(b) 為例,從左下角的R1 出發逆時針繞一圈,研究各分岔線或分界線對運動行為的影響. 從R1出發,當u1 的值增加時,系統跨過u1 = 1 分界線進入R2 (箭頭I),運動類型由grazing-sliding (圖5(a)) 變成crossing-sliding (圖5(b)). 這是因為隨著u1 增加,系統在第一段時間上的黏滯區域逐步地變為非黏滯區域,無法再保證系統不發生后退運動. 從R2 出發,當u3 的值增加時,系統跨過u3 = 1 分界線進入R4 (箭頭II),運動類型由crossing-sliding (圖5(b)) 變成無黏滯運動(圖5(f)). 這是因為,隨著u3 的增加,僅存的黏滯區域也逐步變成非黏滯區域,因而系統將不再黏滯. 注意到?P1 = 0 與?P2 = 0 兩條曲線在u1 相交,這是因為當u1=1 時,系統在第一段上加速度為0(見式(2)),所以?P1 = 0 成立,也就意味著?P2 = 0 成立. 由此可知,從R4 出發,系統有兩種選擇,一種是跨過u1 = 1 進入R1 (箭頭III),運動類型再次變成grazingsliding(圖5(c)). 這是因為隨著u1 減小,系統在第一段時間的非黏滯區域又變成黏滯區域,因而保證系統不會后退,而且,這個區域中.P1 > 0,系統在第三段時間內會由于慣性保持速度為正,不會向后運動.另外一種,系統從R4 出發,經過.P2 = 0 分岔線進入R3 區域(箭頭IV),運動類型變成switching-sliding (圖5(d)),這是因為跨過虛線,.P2 由負變正,意味著系統在第一段時間上速度由負值開始逐漸增大,且一定會在t1 時刻之前,達到速度為0. 考慮到第一段時間區間上為滑移區域,因而這會引起switching-sliding運動. 從R1 出發,跨過.P1 = 0 分岔線,系統也會進入R3(箭頭V),這是因為點劃線左邊.P1 < 0,意味著x2(0) < 0,而第一段時間區間為滑移區域,因而會發生switching-sliding 運動. 最后,從R3 出發,隨著u3減小,系統會回到R1 區域(箭頭VI). 這是因為,系統在第三段時間上的非粘滑區域變成了粘滑區域,再次保證了系統不會向后運動.
4.數值驗證
由第3 節可知,決定系統分岔特性的變量是驅動參數ui(i = 1; 2; 3),為了驗證分岔結果是否正確,以及運動特性是否與理論分析一致,有必要對其進行數值計算的驗證. 本節中物理參數固定,唯一改變的是驅動參數. 這里選定L = 1 m, u = 0:333 3,g = 10m/s2, f = 0:2,通過改變控制驅動參數wi(i = 1; 2; 3),可以得到所有類型的運動特性圖形. 本節中取u2 = 5,這樣系統的粘滑運動類型可以由圖6(b) 直觀地看出. 圖7 通過數值計算,得到了系統在不同區域的速度時間圖. 通過比較表3 和圖7,發現理論分析出的運動類型和數值計算的運動形態吻合.通過對比圖5 和圖7,發現運動形態的理論分析和數值計算結果吻合. 由此,驗證了本文中理論分析的正確性.
表3 數值計算四組驅動參數
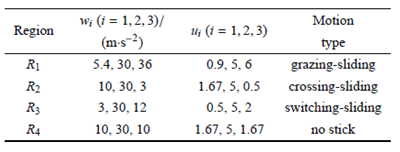

圖7 數值方法得到的系統在不同區域的速度時程圖
5.結論
本文研究了受三相驅動的振動驅動系統在水平面上的直線運動. 不同于以往的研究,本文重點關注了系統在各向同性干摩擦下的運動. 這種環境與物理實際比較吻合,研究工作具有潛在的實用價值.含庫倫干摩擦的振動驅動系統是一種Filippov系統,因而本文采用滑移分岔的理論分析了其粘滑運動. 在只考慮系統向前運動的情況下,可以將運動分成4 種基本情形. 對4 種情形分類討論,并加以歸納,最終得到4 種不同的粘滑運動. 借助理論分析得到的分岔條件,我們給出了在驅動參數wi (i = 1; 2; 3)變化時,系統運動的分岔圖. 通過數值模擬,運動分類以及各種運動形態的正確性都得到了驗證.通過本文的滑移分岔分析,可以看到,三相振動驅動系統在各向同性干摩擦環境下具有豐富的動力學行為,值得進一步的實驗驗證和探究. 此外,從結構上改善和提升振動驅動系統,使其更好地適應各向同性干摩擦環境,也是未來值得思考的問題.
綜上,系統存在4 種定性不同的運動類型,其中3種運動中存在黏滯,1種無黏滯發生.
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

