



含冗余驅(qū)動支鏈4-UPS&UP 并聯(lián)機構(gòu)的運動學(xué)性能分析
2017-1-4 來源:天津大學(xué)機構(gòu)理論與裝備設(shè)計教育部重點實驗 作者:董成林 劉海濤 黃 田
摘要:分析含冗余驅(qū)動支鏈4-UPS&UP 并聯(lián)機構(gòu)的運動學(xué)性能,該并聯(lián)機構(gòu)由著名的Tricept 機器人并聯(lián)模塊3-UPS&UP 機構(gòu)增加一條無約束驅(qū)動支鏈所得。因冗余驅(qū)動支鏈的引入,該并聯(lián)機構(gòu)比3-UPS&UP 機構(gòu)擁有更高的承載能力和更好的靜、動態(tài)性能。在建立 4-UPS&UP 機構(gòu)的位置逆解模型和7 ? 6廣義雅可比矩陣的基礎(chǔ)上,得到驅(qū)動關(guān)節(jié)速度到動平臺參考點線速度的4? 3量綱一雅可比矩陣,并據(jù)該矩陣的條件數(shù)提出局部運動學(xué)性能評價指標。最后,在同尺度下對 4-UPS&UP 和3-UPS&UP 并聯(lián)機構(gòu)的運動學(xué)性能進行了對比分析,得到前者運動學(xué)性能優(yōu)于后者的結(jié)論。
關(guān)鍵詞:并聯(lián)機構(gòu);冗余驅(qū)動;運動學(xué)性能
0.前言
為了滿足復(fù)雜工況需求,要求工業(yè)機器人驅(qū)動關(guān)節(jié)的數(shù)目大于完成任務(wù)所需的自由度數(shù)。此類機器人被稱為冗余機器人,包括運動冗余和驅(qū)動冗余兩大類[1-2]。運動冗余通過添加額外的驅(qū)動關(guān)節(jié)以增加機構(gòu)運動自由度,能夠有效避免機構(gòu)奇異、增大工作空間[2],主要用于串聯(lián)機器人;而驅(qū)動冗余只增加驅(qū)動關(guān)節(jié)的個數(shù),不改變機構(gòu)的自由度,能有效地提高機器人的承載能力并獲得較好的靜、動態(tài)性能[1,3-4],廣泛應(yīng)用于并聯(lián)機器人。并聯(lián)機器人的驅(qū)動冗余通過兩種方式實現(xiàn):① 在不改變原機構(gòu)結(jié)的基礎(chǔ)上,增加支鏈中主動關(guān)節(jié)數(shù)目,使其大于機構(gòu)自由度數(shù)(鏈內(nèi)冗余);② 在原機構(gòu)中增加至少一條額外的驅(qū)動支鏈(支鏈冗余)[2]。第一種方式構(gòu)造簡單,但易破壞原有機構(gòu)的對稱性,因此第二種方式較為常見[5]。受此啟發(fā),為進一步提高Tricept 混聯(lián)機器人[6-7]的承載能力、剛度以及動態(tài)特性,克服其在臥式布局應(yīng)用中受重力場影響,導(dǎo)致的驅(qū)動支鏈受力不均、電機力矩過載等問題,提出在其并聯(lián)模塊3-UPS&UP 機構(gòu)的基礎(chǔ)上,通過增加一條無約束主動支鏈(UPS) 得到含冗余驅(qū)動支鏈的4-UPS&UP 機構(gòu),如圖1 所示。
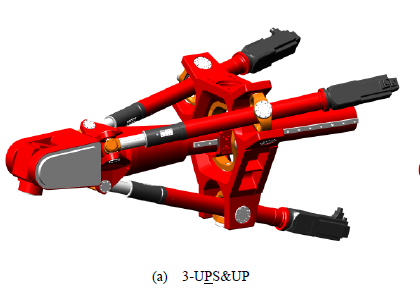
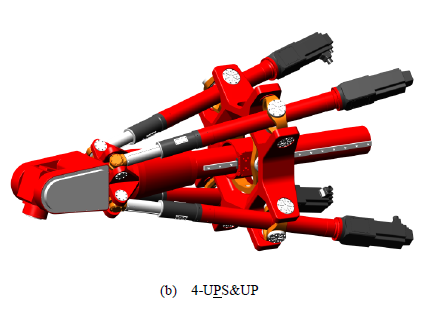
圖1 分別以3-UPS&UP、4-UPS&UP 機構(gòu)為主模塊的混聯(lián)機器人
運動學(xué)性能分析是并聯(lián)機構(gòu)設(shè)計的基本環(huán)節(jié)之一,其關(guān)鍵是選擇合適的性能評價指標。目前,構(gòu)建并聯(lián)機構(gòu)運動學(xué)性能評價指標的方式主要有兩種。一是利用速度雅可比矩陣的代數(shù)特征,如行列式、條件數(shù)、奇異值等。值得注意的是,對于存在平動與轉(zhuǎn)動自由度耦合的并聯(lián)機構(gòu),雅可比矩陣中各項的物理量綱不一致[8],因而不能直接用其代數(shù)特征構(gòu)造性能評價指標,需要首先對雅可比矩陣進行量綱歸一化處理。針對該問題,ANGELES 等[9-10]提出了特征長度法。此外,還可選用動平臺上若干特征點的線速度表征機構(gòu)末端操作速度,建立其與驅(qū)動速度間的映射模型[11-12],進而得到量綱一致的雅可比矩陣。二是借助螺旋理論,基于虛系數(shù)[13]概念構(gòu)建性能評價指標,如傳遞指標[14-15]、傳遞率[16-19]等。此類指標利用實際的傳遞功率與理論上可能的最大傳遞功率之比作為評價機構(gòu)運動/力傳遞特性的優(yōu)劣,具有量綱一致的特點。
本文以含冗余驅(qū)動支鏈的3 自由度4-UPS&UP并聯(lián)機構(gòu)為對象,在構(gòu)建位置逆解模型和廣義雅可比矩陣的基礎(chǔ)上,以末端參考點的線速度為獨立坐標,建立此機構(gòu)的量綱一雅可比矩陣,進而利用該雅可比矩陣的條件數(shù)作為局部性能評價指標,通過算例在同尺度下分析比較該機構(gòu)與3-UPS&UP并聯(lián)機構(gòu)的運動學(xué)性能,其目的在于初步論證該方案的可行性,以明確后續(xù)結(jié)構(gòu)參數(shù)設(shè)計及承載能力、剛度、動態(tài)特性對比分析的必要性。
1.機構(gòu)描述與坐標系建立
圖2 示出了4-UPS&UP 并聯(lián)機構(gòu)的結(jié)構(gòu)簡圖。該機構(gòu)由靜平臺、動平臺以及與相連它們的四條無約束主動UPS 支鏈和一條恰約束UP 支鏈組成。在此,U、P、S 分別表示虎克鉸、移動副和球鉸; P表示主動移動副。機構(gòu)中的UPS 支鏈一端通過虎克鉸和靜平臺連接,另端通過球鉸與動平臺相連;UP支鏈一端通過虎克鉸和靜平臺連接,另端與動平臺固接,進而使得動平臺僅能作繞虎克鉸兩正交回轉(zhuǎn)軸線的轉(zhuǎn)動,以及相對虎克鉸內(nèi)圈的移動。易見,該3 自由度機構(gòu)具有四個驅(qū)動關(guān)節(jié)(P 副),因此屬冗余驅(qū)動并聯(lián)機構(gòu)。此外,為了提高該機構(gòu)的姿態(tài)能力,可以根據(jù)不同的應(yīng)用需求在UP 支鏈末端串接2~3 自由度轉(zhuǎn)頭,進而實現(xiàn)末端執(zhí)行器5~6 自由度空間運動,如圖1b 所示。
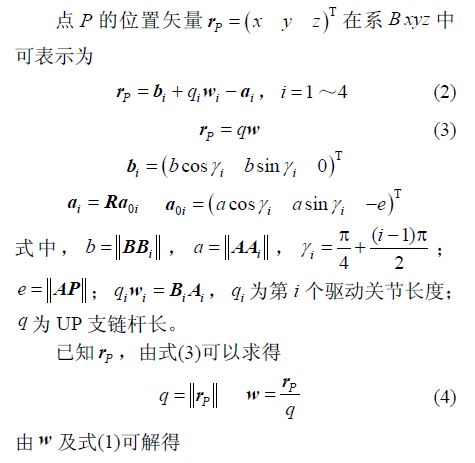
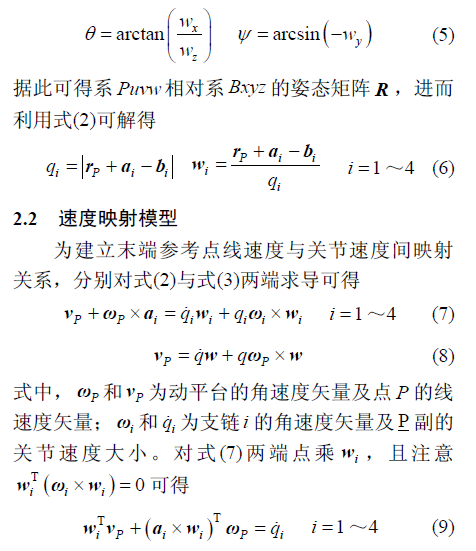
如圖 2 所示,令點Bi和 Ai ( i =1 ~ 4 )分別表示第i 條UPS 支鏈中虎克鉸和球鉸中心,二者分別構(gòu)成正方形?B1B2B3B4和?A1A2A3A4;點B表示 UP 支鏈連架虎克鉸中心,且與?B1B2B3B4中心重合;點 A為UP 支鏈軸線與?A1A2A3A4 所在平面交點,且與?A1A2A3A4中心重合;UP 支鏈軸線與?A1A2A3A4所在平面垂直;末端參考點P 為UP 支鏈軸線延長線上的一點。在?B1B2B3B4所在平面內(nèi),以點B為原點建立參考坐標系Bxyz ,其中y 軸與UP 支鏈連架虎克鉸軸線重合;z軸與?B1B2B3B4所在平面垂直;x 軸滿足右手定則。為描述UP 支鏈姿態(tài),在末端參考點P 建立連體系Puvw,其中u 軸與UP 支鏈連架虎克鉸內(nèi)圈軸線重合; w 軸與該支鏈軸線重合,且由點B 指向點P ; v 軸滿足右手定則。于是,系Puvw相對系Bxyz 的姿態(tài)可通過首先繞連架虎克鉸近架軸y 軸旋轉(zhuǎn)角? ,然后繞遠架軸u 軸旋轉(zhuǎn)角來描述。據(jù)此,系Puvw相對系Bxyz 的姿態(tài)矩陣可表示為
此外,根據(jù)4-UPS&UP 并聯(lián)機構(gòu)結(jié)構(gòu)特點,定義其任務(wù)空間Wt為一半徑為R,高為h的圓柱體,并定義點B至Wt的最小距離為H (見圖 2)。
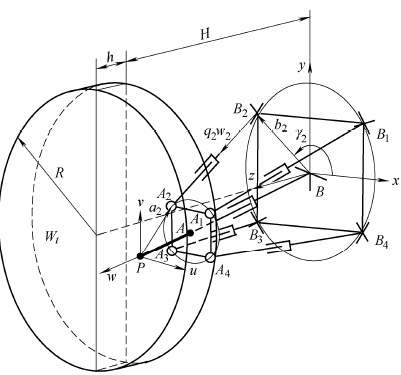
圖2 4-UPS&UP 并聯(lián)機構(gòu)結(jié)構(gòu)簡圖
2.運動學(xué)逆解分析
2.1 位置逆解
4-UPS&UP 并聯(lián)機構(gòu)位置逆解分析可歸結(jié)為已知機構(gòu)尺度參數(shù)和點P 位置矢量,求解動平臺姿態(tài)和各UPS 支鏈中驅(qū)動關(guān)節(jié)長度的問題。
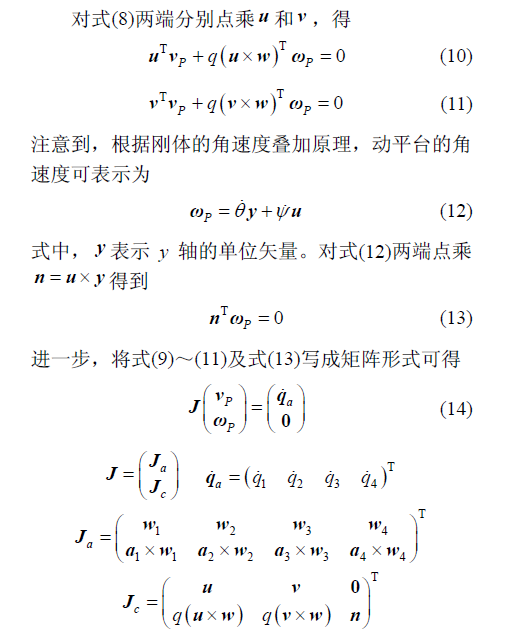
式中,J 為7? 6矩陣,被定義為 4-UPS&UP并聯(lián)機構(gòu)的廣義雅可比矩陣[20];其中,Ja 被稱為驅(qū)動雅可比矩陣, Jc 被稱為約束雅可比矩陣。將其與3-UPS&UP 機構(gòu)的雅可比矩陣進行對比,發(fā)現(xiàn)兩機構(gòu)的Jc相同、Ja 不同。可見,冗余驅(qū)動支鏈(UPS)的引入僅改變了3-UPS&UP 機構(gòu)的驅(qū)動特性,對其約束特性無影響。
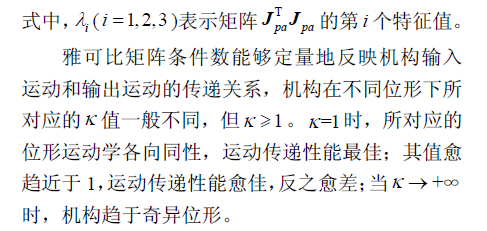
3.運動學(xué)性能評價
3.1 運動學(xué)性能指標

3.2 算例
現(xiàn)以Tricept 605 中并聯(lián)模塊3-UPS&UP 機構(gòu)為參考對象(尺度參數(shù)見表1),在相同尺度參數(shù)及任務(wù)空間下,對比分析本文提出的4-UPS&UP 機構(gòu)與3-UPS&UP 機構(gòu)的運動學(xué)性能。圖 3 示出了在兩種機構(gòu)在任務(wù)空間Wt 中z ? H 、z ? H ? 0.5h以及z ? H ? h三個截面內(nèi)? 的分布。由圖可見,對于4-UPS&UP 機構(gòu)和3-UPS&UP機構(gòu),? 均隨Wt徑向和軸向尺寸的增加而單調(diào)增大;且前者呈空間四對稱分布,后者呈空間三對稱分布。
表1 Tricept 605 基本尺度參數(shù) m
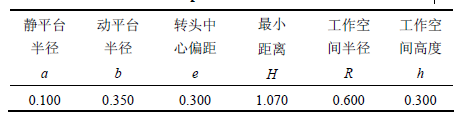
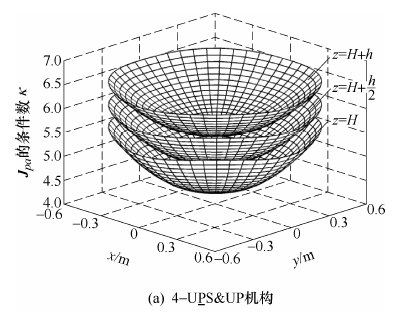
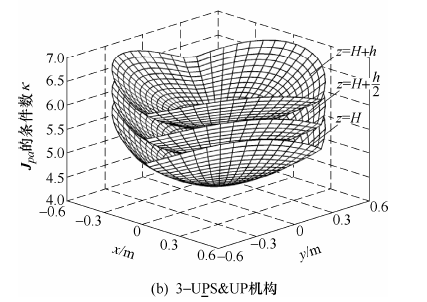
圖 3 k在Wt 中的分布情況
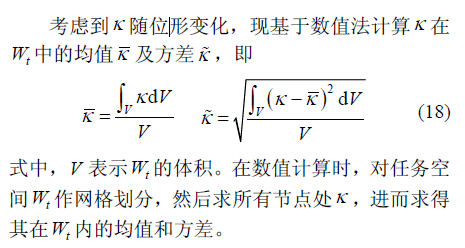
表2 給出了兩種機構(gòu)? 及?? 的數(shù)值計算結(jié)果。由表2 可見,4-UPS&UP 并聯(lián)機構(gòu)? 的全域均值和標準差均略低于3-UPS &UP 并聯(lián)機構(gòu)。若選取? 在Wt 中的均值? 及方差?? 作為全域運動學(xué)性能指標[22],計算結(jié)果表明4-UPS&UP 機構(gòu)的全域運動學(xué)性能優(yōu)于3-UPS&UP 機構(gòu)。
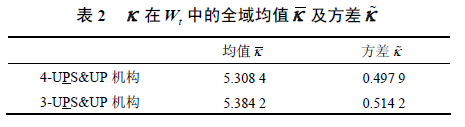
以上分析表明,含冗余驅(qū)動支鏈4-UPS&UP 并聯(lián)機構(gòu)的運動學(xué)性能優(yōu)于同尺度下的3-UPS&UP 并聯(lián)機構(gòu)。
4.結(jié)論
本文提出了一種新型3 自由度冗余驅(qū)動并聯(lián)機構(gòu)——4-UPS&UP,研究了該機構(gòu)的位置逆解與速度建模問題,以末端參考點的線速度為獨立坐標構(gòu)建了該機構(gòu)的量綱一雅可比矩陣,據(jù)此提出以該矩陣的條件數(shù)? 作為局部運動學(xué)性能評價指標,并在同尺度下對比分析了該機構(gòu)與3-UPS&UP并聯(lián)機構(gòu)的運動學(xué)性能,得到如下結(jié)論。
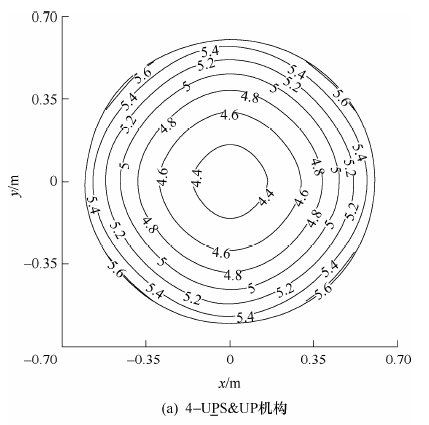
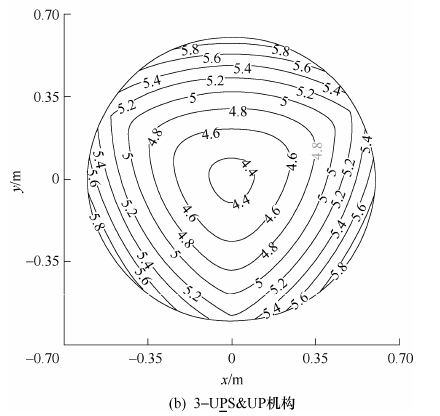
圖 5 ?k 在Wt 上截面的等高線分布
(4) 綜上所述,冗余驅(qū)動支鏈的引入有助于提高3-UPS&UP 機構(gòu)的運動學(xué)性能,其對靜、動態(tài)特性影響的定量分析將在后續(xù)的研究工作中開展。
投稿箱:
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年5月 新能源汽車銷量情況
- 2025年5月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年5月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年5月 軸承出口情況
- 2025年5月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年5月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年4月 新能源汽車銷量情況
- 2025年4月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年4月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年4月 軸承出口情況
- 2025年4月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年4月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年1月 新能源汽車銷量情況