



加工中心雙懸浮系統支持向量機α階逆解耦時變滑模控制
2016-7-14 來源:沈陽工業大學 作者:劉春芳 榮剛
摘要:龍門數控加工中心移動機械橫梁可采用雙電磁懸浮系統共同懸浮來消除摩擦的影響,而這兩個電磁懸浮系統存在著一定的耦合關系。當數控機床工作時,由于受力不平衡或者擾動等因素影響,這種耦合的存在會使兩個電磁懸浮系統的懸浮氣隙受到影響,并降低加工精度。分析得出了橫梁發生繞質心旋轉和上下平移時兩個電磁懸浮系統的耦合定量關系,為了消除耦合的影響,采用支持向量機逼近雙電磁懸浮系統的毩階逆系統,將所得到的毩階逆系統串聯在原系統前構成偽線性復合系統,從而將原系統解耦成兩個獨立的SISO 偽線性系統。針對解耦后的偽線性SISO 系統設計了時變滑模變結構控制器,可使系統在任意初始狀態下系統狀態變量都能直接到達系統的滑模面上,消除了狀態變量到達滑模面的過程,以最短的時間實現了滑模變結構控制,實現了對參數攝動和外部干擾的全局魯棒性。仿真實驗結果表明,該方案不需要被控對象精確的數學模型即可采用支持向量機逼近被控系統的毩階逆系統,可有效地對耦合的懸浮系統實現解耦。解耦后的SISO 偽線性系統采用時變滑模變結構控制具有響應速度快和魯棒性強等特點。
關鍵詞:毩階逆系統;解耦;支持向量機;時變滑模變結構
0、引言
隨著科學技術的發展,人們對零件加工精度的要求也越來越高。傳統的龍門移動數控機床移動橫梁與導軌完全接觸存在著摩擦,即使加入潤滑劑也不能完全消除摩擦影響。為了消除摩擦的影響,利用兩個電磁懸浮系統將移動橫梁懸浮起來,可提高加工精度。由于兩個電磁懸浮系統控制同一個移動機械橫梁,所以它們之間存在著一定的耦合關系,即當橫梁傾斜或旋轉時,兩個電磁懸浮系統的懸浮氣隙會同時發生變化,從而兩個電磁懸浮系統的電磁力和其他參數也會受到影響。以往的文獻忽略了兩個電磁懸浮系統的耦合關系,只是通過設計良好的同步控制器來減小兩個電磁懸浮系統的同步誤差[1]。耦合的存在會降低工件的加工精度,從而降低系統的穩定性。
針對兩個系統存在的耦合關系,本文采用毩階逆系統解耦控制方法消除耦合對系統穩定懸浮的影響,其原理為:將原系統的毩階逆系統與原系統串聯就可將雙電磁耦合懸浮系統解耦成兩個獨立的SISO 系統,并可將獨立的系統簡化為偽線性系統,降低SISO 系統控制器的設計難度[2]。逆系統解耦方法需要被控對象數學模型精確可知,但在工程實踐中很難做到,而且非線性被控對象復雜多變,所以逆系統模型就更加難以建立了。
支持向量機(SVM)的出現為解決非線性系統的逆系統建模難的問題提供了一種有效的方法。支持向量機可以逼近任意非線性函數,這為其用于對系統的辨識提供了理論依據[3-4]。本文在分析了龍門數控加工中心雙電磁懸浮系統耦合情況的基礎上,證明了系統的可逆性。由于被控系統的精確數學模型難以建立,所以利用支持向量機可以逼近任意非線性函數的特點,可辨識出被控系統的毩階逆系統。得到的逆系統與被控對象串聯構成偽線性系統,從而將MIMO系統解耦成多個SISO。解耦后的單系統采用專家PID閉環控制,增加了懸浮系統的快速性和魯棒性。仿真實驗表明,支持向量機毩階逆系統可以很好地解決系統的耦合問題。
1、雙電磁懸浮系統耦合數學模型
1.1、單電磁懸浮系統數學模型
圖1為龍門移動數控加工中心機械結構圖。
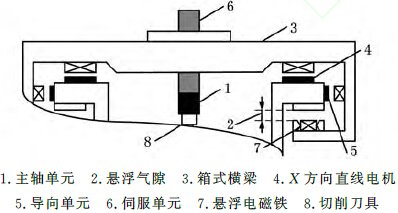
圖1雙懸浮系統數控機床部分結構圖
從圖1可以看出,移動橫梁由兩個電磁懸浮系統共同懸浮,為了分析得出兩個電懸浮系統之間的耦合關系,首先需要從建立單電磁懸浮系統數學模型開始。圖2為單電磁懸浮系統結構圖,圖中,Φ1 為漏磁通;Φm 為氣隙磁通。
由文獻[1]得單電磁懸浮系統數學表達式為
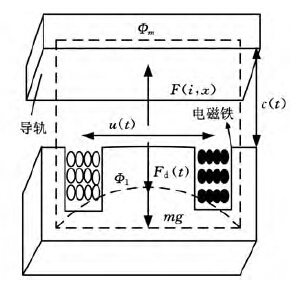
圖2單電磁懸浮系統結構圖
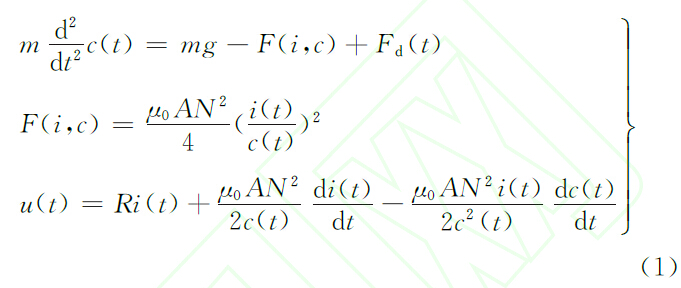
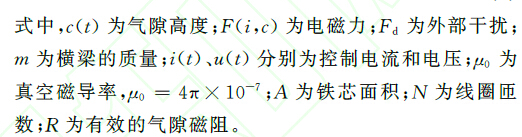
由式(1)可以看出,電磁懸浮系統由運動方程、電磁力方程和電壓方程組成,其中電磁力與電流的平方成正比,與懸浮氣隙的平方成反比,因此電磁懸浮系統是典型的非線性系統。
1.2、橫梁雙懸浮系統耦合分析
雙電磁懸浮系統耦合示意圖見圖3,圖3中,c1、c2、f1、f2、ι、 θ分別為兩個電磁鐵的傳感器位移、兩個電磁鐵的電磁力、橫梁的一半長度和橫梁旋轉的角度。
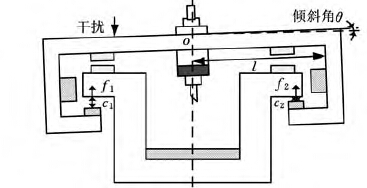
圖3雙電磁懸浮系統耦合示意圖
其中,轉動角
豎直方向上的位移:
旋轉方向上位移:
由式(3)、式(4)得

豎直方向上的合力:
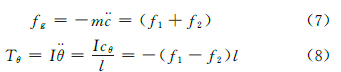
fg =f1 +f2 (6)
質心運動動力學方程和繞質心轉動動力學方程分別為
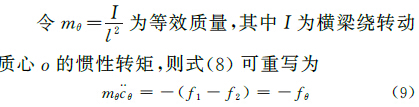
經過力的坐標與傳感器中坐標之間的變換及式(7)、式(9)得加速度與力的關系為
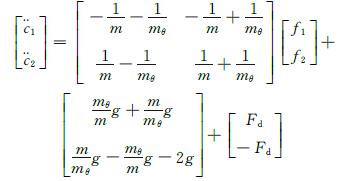
式(10)表明兩個電磁懸浮系統的加速度存在著耦合關系。
2、雙電懸浮系統可逆性分析

根據式(1)可以得出電磁力與電壓之間的關系為
式中,l0 為電磁力系數;i1 、i2 為雙電磁鐵線圈的控制電流;u0 為真空磁導率。
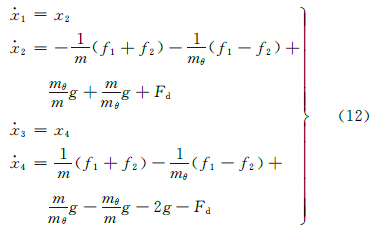
通過式(1)和式(10)可以得出系統狀態方程如下:
計算輸出變量對時間的導數可以得到:
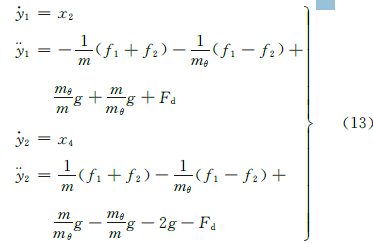
將式(11)代入式(13),式(13)會直接變為輸入變量為u1、u2 的方程組。
Jacobi矩陣
GONGSHI 12
3、雙懸浮系統支持向量機毩階逆解耦
對于耦合的雙電磁懸浮系統,可采用毩階逆系統方法進行解耦,其基本思想為:將建立的MIMO被控系統的毩階逆系統串聯在原系統前構成偽線性復合系統,原系統會被解耦成多個獨立的SISO 系統,并且獨立系統具有線性傳遞性質,即偽線性系統。解耦后的獨立子系統可以采用線性控制方法,簡化了系統的結構,適合于工程實踐。
逆系統方法的實現必須滿足兩個條件:第一,被控對象數學模型精確可知,第二,非線性模型的逆必須求解出來。非線性模型復雜多變,逆系統模型不易求出。由于支持向量機具有逼近任意非線性函數的功能且具有風險函數最小化的特點,因此本文采用支持向量機來逼近雙電磁懸浮系統的α階逆系統來達到對耦合系統進行解耦的目的。其基本原理為:通過非線性內積核函數將數據從低維空間Rn 映射到Hilbert高維特征空間,然后在高維空間建立一個線性回歸函數,其表達形式為
式中,w 為權值;Φ(x)為非線性映射;b 為閾值。當輸入樣本訓練集(xi,ui)時(i=1,2,…,j),其中,xi 為懸浮氣隙采集點,ui 為依據結構風險最小化原理,則支持向量機回歸學習最優逼近應使得風險函數最小:
通過引用對偶定理、拉格朗日函數及核函數,將式(17)等價為如下凸二次規劃問題:
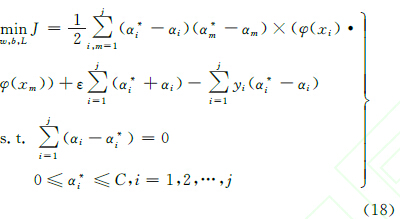
最后可以構造非線性回歸函數[5-6] 如下:
支持向量機擬合毩階逆系統流程如圖4所示。
4、時變滑模變結構控制
本文設計了時變滑模變結構控制器對解耦后的單懸浮系統進行控制。時變滑模變結構改進了滑模變結構控制或其改進方法在系統的狀態變量未到達設定的滑模面之前無法實現的不足,使系統在任意初始狀態下的狀態變量都能直接到達系統的滑模面上,取消了狀態變量到達滑模面的過程,以最短的時間實現滑模變結構控制,實現對參
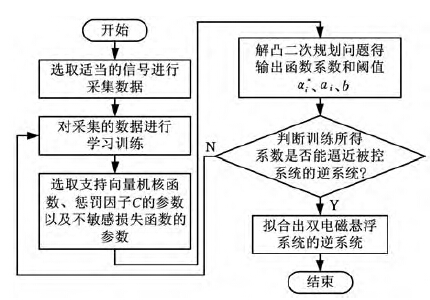
圖4支持向量機擬合毩階逆系統流程
數攝動和外部干擾的全局魯棒性[7]。時變滑模變結構控制器設計如下:
由式(1)可知,該磁懸浮系統是一個典型的非線性系統,為設計方便,可以通過相應的坐標變換,將其變換為仿射型非線性系統。
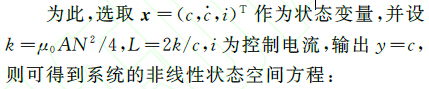
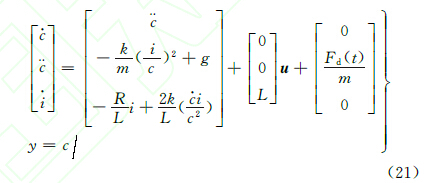
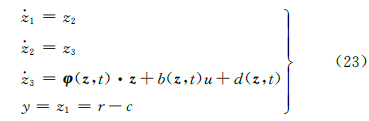
設位置指令為r,選取位置誤差z1、速度誤差z2、加速度誤差z3 為狀態變量,則誤差表達式可表示為

因此可得到新坐標系下的磁懸浮系統仿射非線性模型表達式:
為了討論問題方便,這里作如下假設。
時變滑模面可設計為

在初始狀態時就處于滑模面上;條件栚保證了系統的漸近穩定性;條件栛保證了滑模運動的存在。同時根據條件栚漸近穩定性求解微分方程得到:
根據上述時變滑模面選取原則,懸浮系統的時變滑模面設計為
時變滑模變結構控制律由線性控制和切換控制兩部分組成,即ud =uc+uvss。其中,線性控制律為
式中,kc 為正的常數。切換控制律為
5、仿真實驗
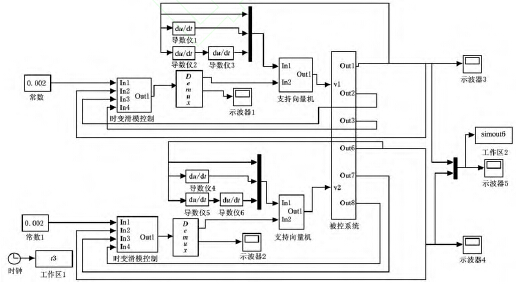
圖5支持向量機α階逆系統解耦系統框圖
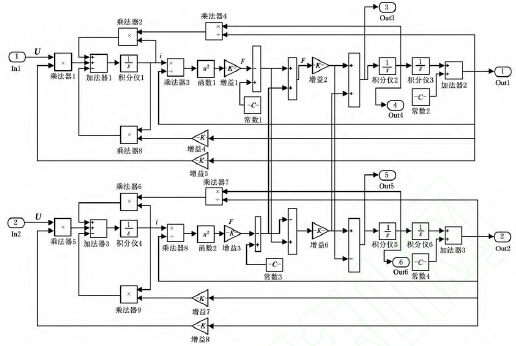
圖6雙電磁懸浮系統仿真框圖
對單懸浮系統施加1000N 干擾雙電磁懸浮系統PID控制仿真結果見圖7。
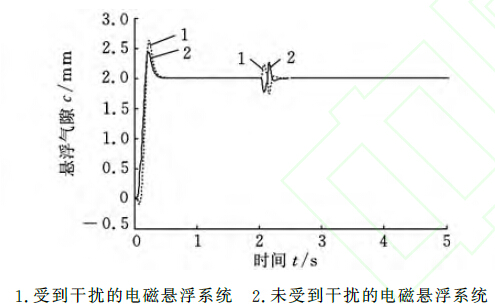
圖7雙電磁懸浮系統未解耦PID 控制仿真曲線
由圖7可得,單電磁懸浮系統受到干擾時另一個系統也會受到影響,這說明兩個電磁懸浮系統存在明顯的耦合關系。
1.受到干擾的電磁懸浮系統暋2.未受到干擾的電磁懸浮系統
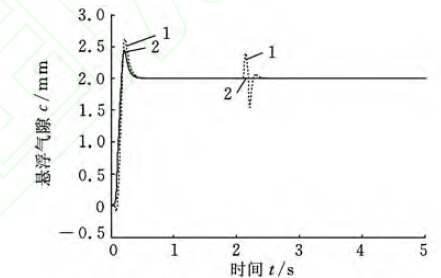
圖8支持向量機α階逆解耦PID 控制仿真曲線
1.受到干擾的電磁懸浮系統暋2.未受到干擾的電磁懸浮系統
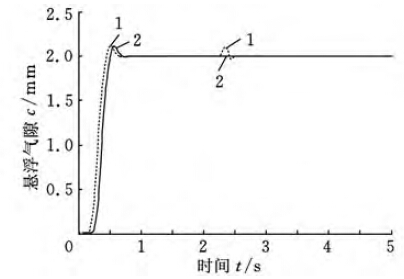
圖9支持向量機α階逆解耦時變滑模變結構仿真曲線
圖8表明支持向量機α階逆系統解耦控制可以很好地使兩個耦合的電磁懸浮系統解耦成兩個獨立的系統互不干擾。圖9表明時變滑模變結構控制較PID 控制具有響應速度快、超調小、魯棒性強的特點。
6、結語
本文對龍門雙電磁懸浮系統耦合情況進行了分析,得出了兩個電磁懸浮系統的耦合關系,通過可逆性分析,證明了耦合雙電磁懸浮系統是可逆的。為了使耦合的雙電磁懸浮系統解耦出兩個獨立的單系統,本文采用α階逆系統對耦合系統進行解耦。由于非線電磁懸浮系統的α階逆系統的精確模型不易得出,因此本文采用支持向量機逼近雙電磁懸浮系統的α階逆系統。解耦后的獨立偽線性系統采用時變滑模變結構控制。仿真結果表明,支持向量機α階逆系統具有很好的解耦控制效果,使兩個懸浮系統互不干擾;時變滑模變結構控制的獨立偽線性系統具有響應速度快、魯棒性強的特點。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

