基于SYNTEC的螺旋錐齒輪加工機(jī)床數(shù)控系統(tǒng)開(kāi)發(fā) (中)
2017-1-3 來(lái)源:沈陽(yáng)工業(yè)大學(xué) 作者:張西棟
第 3 章 新代 SYNTEC 數(shù)控系統(tǒng)
新代 SYNTEC-10B 數(shù)控系統(tǒng)作為臺(tái)灣新代科技股份有限公司開(kāi)發(fā)的具有良好性價(jià)比的數(shù)控產(chǎn)品,具有很高的市場(chǎng)競(jìng)爭(zhēng)力,它具有開(kāi)放式的架構(gòu),能夠滿足用戶的個(gè)性化客制要求,標(biāo)準(zhǔn)便捷的控制面板是人機(jī)交互的基礎(chǔ)。
3.1 SYNTEC 數(shù)控系統(tǒng)概述
齒輪在機(jī)械行業(yè)中占有舉足輕重的地位,是機(jī)械工業(yè)的基礎(chǔ)件[30]。在相交軸傳動(dòng)的場(chǎng)合,弧齒錐齒輪具有明顯有點(diǎn),例如承載能力高、傳動(dòng)效率高、對(duì)安裝誤差的敏感性小以及傳動(dòng)平穩(wěn)等。鑒于該型齒輪優(yōu)越的性能,它的數(shù)控加工越來(lái)越得到工程技術(shù)人員的重視[15]。由于弧齒錐齒輪的數(shù)控加工程序編制復(fù)雜,而且編程語(yǔ)言抽象;所以為了滿足不同規(guī)格螺旋錐齒輪的數(shù)控加工要求,需要對(duì)其進(jìn)行的參數(shù)化編程,而參數(shù)化編程的思想是以友好的參數(shù)化輸入界面—人機(jī)界面(Human Machine InterfaceHMI)為基礎(chǔ)的。用戶與機(jī)床之間的信息傳遞是通過(guò)人機(jī)界面來(lái)完成的,人機(jī)界面是互相傳遞信息的媒介,它可以實(shí)現(xiàn)信息的輸入和輸出[38]。數(shù)控系統(tǒng)操作界面的友好與否直接影響到數(shù)控編程的效率,甚至影響到整個(gè)數(shù)控系統(tǒng)的用戶認(rèn)可度[39],所以人機(jī)界面在整個(gè)數(shù)控系統(tǒng)的開(kāi)發(fā)中同樣占有舉足輕重的位置。 新代科技股份有限公司成立于 1995 ,是一家專業(yè)的 PC based 控制器廠商,長(zhǎng)期從事于機(jī)床控制器的軟件及硬件技術(shù)研發(fā),并致力于拓展兩岸市場(chǎng),目前已成為亞太市場(chǎng)中最具有影響力及發(fā)展?jié)摿Φ目刂破髌放浦弧?/font>
新代專注于數(shù)控領(lǐng)域,產(chǎn)品涵蓋車銑床控制器與產(chǎn)業(yè)機(jī)械控制器,以高度的技術(shù)創(chuàng)新、加值型應(yīng)用以及完善的售后服務(wù)深得顧客信任;除機(jī)床控制器外,近年來(lái)將產(chǎn)品延伸至高端主軸伺服方案、線性馬達(dá)以及直驅(qū)馬達(dá)等特色產(chǎn)品。為了順應(yīng)智慧自動(dòng)化的趨勢(shì),積極開(kāi)發(fā)通用型的自動(dòng)化控制器及各類型機(jī)械手臂控制器,能提供相關(guān)的整合加值產(chǎn)品,滿足各種生產(chǎn)線智能化及自動(dòng)化的需求。新代科技以“工業(yè) 4.0”作為新技術(shù)發(fā)展的主軸,積極在相關(guān)領(lǐng)域進(jìn)行資源整合與布局。 我單位為了滿足螺旋錐齒輪數(shù)控加工機(jī)床的開(kāi)發(fā)需要,引進(jìn)了臺(tái)灣新代科技股份有限公司研發(fā)的 SYNTEC-10B 數(shù)控系統(tǒng),該系統(tǒng)具有較高的性價(jià)比,良好的開(kāi)放性,可以利用系統(tǒng)自帶軟件開(kāi)發(fā)包,對(duì)螺旋錐齒輪數(shù)控加工所需的各級(jí)參數(shù)輸入界面進(jìn)行相關(guān)客制,形成一個(gè)完備的界面系統(tǒng),為后期參數(shù)化編程工作打下良好基礎(chǔ)。
3.2 軟件工具
對(duì)新代數(shù)控系統(tǒng)的二次開(kāi)發(fā)之前需要登錄新代科技股份有限公司的官方網(wǎng)站(http://www.syntecclub.com.tw/),注冊(cè)一個(gè)用戶帳號(hào),登錄到相關(guān)的“下載專區(qū)”欄目中,下載 win32 版本的相關(guān)客制仿真軟件、升級(jí)包,分別為:Windows Update 升級(jí)包、Lad Edit-2.13.0.msi、Macro Dev 軟件、銑床 Win32 軟件(數(shù)控銑床專用)。這四個(gè)軟件開(kāi)發(fā)包是新代科技股份有限公司專門(mén)為自己的新代數(shù)控系統(tǒng)進(jìn)行二次開(kāi)發(fā)而特定開(kāi)發(fā)的軟件,這是對(duì)新代數(shù)控系統(tǒng)進(jìn)行開(kāi)發(fā)設(shè)計(jì)的軟件基礎(chǔ)。
軟件的安裝環(huán)境是通用型 PC 機(jī),操作環(huán)境要求是 windows7/XP/2000,特別注意:四個(gè)軟件需要按照規(guī)定順序依次安裝,否則會(huì)出現(xiàn)兼容性問(wèn)題[40]。其中的 Windows Update 升級(jí)包里面有單獨(dú)的安裝說(shuō)明,需要按照安裝要求一步步地安裝,任何一個(gè)軟件安裝環(huán)節(jié)出現(xiàn)問(wèn)題,就需要將之前安裝完畢的所有軟件都卸載,清理注冊(cè)表之后重新安裝,否則會(huì)出現(xiàn)安裝失敗或者安裝成功卻無(wú)法運(yùn)行的情況。安裝完之后需要重啟計(jì)算機(jī),然后開(kāi)發(fā)客制軟件即可在通用 PC 上運(yùn)行了,操作環(huán)境為 windows2000/XP/7。
SYNTEC 系統(tǒng)相配套的 e HMI 是一款可以幫助您更直覺(jué)、更簡(jiǎn)易編輯控制面板人機(jī)接口的開(kāi)發(fā)工具,仿真器安裝完畢之后,需要安裝該客制軟件。在 e HMI 中通過(guò)直接點(diǎn)選和表格輸入的方式,讓用戶免除繁雜的程序編寫(xiě)過(guò)程,取而代之的是更簡(jiǎn)易、更有效率、更人性化的操作接口[41,42]。將 e HMI 開(kāi)發(fā)軟件用于參數(shù)化編程中所需相關(guān)界面的客制工作,可以提高數(shù)控系統(tǒng)二次開(kāi)發(fā)的效率,優(yōu)化數(shù)控編程加工過(guò)程中的人機(jī)交互性。圖 3.1 是 e HMI 的客制設(shè)計(jì)界面之一。
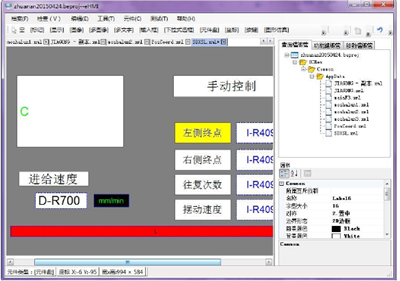
圖 3.1 e HMI 的客制設(shè)計(jì)界面之一
3.3 新代數(shù)控系統(tǒng)開(kāi)放式架構(gòu)
3.3.1 新代 10B 控制器架構(gòu)
數(shù)控銑床上采用的是 10B 控制器,該型控制器具有較好的開(kāi)放式接口架構(gòu),除了出廠設(shè)定的標(biāo)準(zhǔn)接口外,控制器另外提供全面且方便的客制環(huán)境,讓電氣控制的開(kāi)發(fā)人員可以利用客制工具進(jìn)行相關(guān)的客制工作,滿足客戶各式各樣的需求。圖 3.2 是新代數(shù)控系統(tǒng)控制器架構(gòu)示意圖。

圖 3.2 新代數(shù)控系統(tǒng)控制器架構(gòu)示意圖
“核心”是控制器里負(fù)責(zé)解譯程序、規(guī)劃運(yùn)動(dòng)方程路線、插值以及軸向移動(dòng)等的部件。PLC 主要是負(fù)責(zé)主導(dǎo)狀態(tài)流程、鏈接外部裝置、與核心的雙向溝通等工作。“人機(jī)”是操作者與控制器內(nèi)部運(yùn)作間的橋梁,操作者使用人機(jī)輸入信息,控制器使用人機(jī)輸出狀態(tài)、信息等。“Program”為加工程序,客制的 MACRO 要經(jīng)過(guò)核心解譯,成為機(jī)器能夠識(shí)別的 G 代碼。
3.3.2 開(kāi)放式數(shù)控系統(tǒng)概述
FANUC 和 SIEMENS 數(shù)控系統(tǒng)是現(xiàn)在市場(chǎng)占有率比較高的數(shù)控系統(tǒng),他們的數(shù)控系統(tǒng)具有一定的封閉性,屬于專用性的體系結(jié)構(gòu),在實(shí)際生產(chǎn)應(yīng)用中,相關(guān)的軟硬件結(jié)構(gòu)均由各自的廠家單獨(dú)設(shè)計(jì)制造,數(shù)控系統(tǒng)的通用性、兼容性不強(qiáng)[43]。數(shù)控加工時(shí),機(jī)床操作人員按照自己的經(jīng)驗(yàn)將加工程序中的過(guò)程參數(shù)設(shè)定為固定值,具體的編程工作利用手工方式或自動(dòng)編程的方式完成,雖然這種數(shù)控系統(tǒng)具有技術(shù)成熟、結(jié)構(gòu)簡(jiǎn)單的優(yōu)點(diǎn),但是這種數(shù)控系統(tǒng)不能夠及時(shí)地與計(jì)算機(jī)輔助制造技術(shù)相融合,隨著現(xiàn)代制造業(yè)的飛速發(fā)展,信息化以及敏捷制造模式越來(lái)越明顯地體現(xiàn)在現(xiàn)代制造業(yè)中,該型數(shù)控系統(tǒng)的缺陷越來(lái)越明顯[44]。
控制系統(tǒng)的封閉性以及專一性與多樣化的市場(chǎng)需求之間的矛盾可以通過(guò)開(kāi)放式數(shù)控系統(tǒng)來(lái)解決。開(kāi)放式的數(shù)控系統(tǒng)在適應(yīng)市場(chǎng)變化的過(guò)程中表現(xiàn)出形式靈活、價(jià)格低、結(jié)構(gòu)緊湊的優(yōu)勢(shì),并具有很強(qiáng)的二次開(kāi)發(fā)性和適應(yīng)性,表現(xiàn)出良好的性價(jià)比優(yōu)勢(shì)。隨著 CNC 技術(shù)的發(fā)展,具有可移植、可伸縮、可重構(gòu)、可擴(kuò)展性等優(yōu)良特性的開(kāi)放式數(shù)控系統(tǒng)越來(lái)越得到技術(shù)人員的重視和認(rèn)可。開(kāi)放式數(shù)控系統(tǒng)允許操作人員在保留原軟硬件的基礎(chǔ)上,根據(jù)自己的需要將傳感器集成在控制器中,對(duì)數(shù)控系統(tǒng)進(jìn)行修改和配置,最終使數(shù)控系統(tǒng)能夠完成加工過(guò)程的控制和監(jiān)視。
1980 年之后,開(kāi)放式數(shù)控系統(tǒng)的研究正式提上日程。IEEE 認(rèn)為開(kāi)放式數(shù)控系統(tǒng)能夠完美地在不同的平臺(tái)上運(yùn)行,兼容性較好,能夠與其它應(yīng)用系統(tǒng)相互操作,并且可以提供統(tǒng)一的用戶交互風(fēng)格,具備可移植性、可互換性、可擴(kuò)展性、可伸縮性等特點(diǎn)[45-48]。根據(jù)開(kāi)放式數(shù)控的定義,這種類型的數(shù)控系統(tǒng)首先應(yīng)該允許終端用戶對(duì)數(shù)控系統(tǒng)進(jìn)行模塊替換、模塊添加、模塊重構(gòu)等操作[49];然后該類數(shù)控系統(tǒng)還應(yīng)該能夠完美地按照技術(shù)人員定義的控制策略運(yùn)行,能夠補(bǔ)償三維空間誤差;其次,該型系統(tǒng)允許機(jī)床按照某一速度運(yùn)行的同時(shí),能夠?qū)崟r(shí)地接收來(lái)自伺服系統(tǒng)的數(shù)據(jù);開(kāi)放式的系統(tǒng)構(gòu)架能夠按照加工的需要將相關(guān)智能控制設(shè)備嵌入到控制器中;而且它能夠根據(jù)過(guò)程控制策略,對(duì)進(jìn)給速度、主軸轉(zhuǎn)速進(jìn)行智能修正。
3.3.3 開(kāi)放式數(shù)控系統(tǒng)發(fā)展趨勢(shì)
數(shù)控系統(tǒng)的發(fā)展趨勢(shì)是以集成化、網(wǎng)絡(luò)化、智能化為特點(diǎn),應(yīng)具有高速、柔性化、高可靠性、高精度的特點(diǎn)。當(dāng)前的數(shù)控系統(tǒng)由于不能適應(yīng)市場(chǎng)的多樣化要求,不能很好地實(shí)現(xiàn)專業(yè)化和多樣化的要求,其結(jié)構(gòu)的封閉性問(wèn)題越來(lái)越突出。需要研究數(shù)控系統(tǒng)開(kāi)放性的體系結(jié)構(gòu),以期能夠?qū)崿F(xiàn)數(shù)控設(shè)備的聯(lián)網(wǎng)、自動(dòng)化、智能化、個(gè)性化、高柔性化目標(biāo)。
(1)數(shù)控加工智能化和集成化
數(shù)控系統(tǒng)的功能模塊向智能化、集成化方向發(fā)展,同時(shí)借助計(jì)算機(jī)技術(shù)、通信技術(shù)、微電子技術(shù)的進(jìn)一步開(kāi)發(fā),控制系統(tǒng)將具備反饋單元、數(shù)據(jù)采集和處理、執(zhí)行單元、伺服驅(qū)動(dòng)等功能,系統(tǒng)的整體性更強(qiáng)[50]。CNC 智能化研究的主要內(nèi)容有智能化控制、自診斷以及智能化接口技術(shù)等,機(jī)床故障智能診斷、刀具狀態(tài)監(jiān)測(cè)、代碼生成技術(shù)、誤差補(bǔ)償與精度控制、CAD/CAM/CNC 一體化與加工參數(shù)優(yōu)化等方面是相關(guān)研究的重點(diǎn)[51] 。
(2)高速、高精、高可靠性
開(kāi)放式數(shù)控系統(tǒng)的主軸轉(zhuǎn)速達(dá) 6000 轉(zhuǎn)/分鐘,進(jìn)給速度達(dá) 60 米/分鐘,系統(tǒng)無(wú)故障時(shí)間可以達(dá)到三萬(wàn)小時(shí)[52]。發(fā)那科系統(tǒng)中的 AI 納米輪廓控制功能可以用于高精度、多坐標(biāo)聯(lián)動(dòng)、小程序段、高速加工中。該功能能夠減小由于伺服延時(shí)、進(jìn)給速度增加以及加減速引起的位置滯后問(wèn)題,有利于減小輪廓的加工誤差。納米輪廓控制可以保證伺服機(jī)構(gòu)接收到納米插補(bǔ)器的指令信號(hào)是納米級(jí)的,工作臺(tái)移動(dòng)的平順性得益于該納米級(jí)的指令信號(hào),從而使工件的表面質(zhì)量和加工精度得到保證。
(3)網(wǎng)絡(luò)化
為了滿足全球制造、虛擬企業(yè)以及敏捷制造等新型生產(chǎn)形式的發(fā)展需要,同時(shí)順應(yīng)企業(yè)生產(chǎn)中信息集成化的趨勢(shì),數(shù)控設(shè)備逐漸走向網(wǎng)絡(luò)化。為了抓住數(shù)控系統(tǒng)網(wǎng)絡(luò)化的趨勢(shì),近年來(lái),幾家知名的數(shù)控裝備公司對(duì)相關(guān)技術(shù)進(jìn)行了研究,并取得了一定的數(shù)控裝備成果,日本馬扎克公司提出智能生產(chǎn)控制中心的概念,德國(guó)西門(mén)子公司提出開(kāi)放制造環(huán)境的項(xiàng)目等[53] 。
(4)柔性化、軟件化
不同的機(jī)床適應(yīng)加工對(duì)象變化的能力是不同的,它的衡量指標(biāo)就是柔性。機(jī)床的柔性包括硬件的柔性和軟件的柔性。傳統(tǒng)生產(chǎn)設(shè)備的控制系統(tǒng)是機(jī)械或剛性連接實(shí)現(xiàn)的,不能滿足加工對(duì)象多樣化的需要。而在可編程器件設(shè)計(jì)的硬件系統(tǒng)中,硬件功能的改變可以通過(guò)調(diào)整相應(yīng)的程序參數(shù)實(shí)現(xiàn),從而增加了硬件系統(tǒng)的柔性。這個(gè)過(guò)程就是硬件的部分功能由軟件來(lái)完成,實(shí)現(xiàn)硬件功能的軟件替換的過(guò)程,這樣可以降低硬件電路的復(fù)雜性,系統(tǒng)柔性得到加強(qiáng)。
為了順應(yīng)開(kāi)放式數(shù)控系統(tǒng)的發(fā)展趨勢(shì),發(fā)揮開(kāi)放式數(shù)控系統(tǒng)在現(xiàn)代數(shù)控加工中體現(xiàn)出來(lái)的優(yōu)越性,新代科技有限公司推出 SYNTEC-10B 數(shù)控系統(tǒng),該型數(shù)控系統(tǒng)同樣也具備良好的開(kāi)放性,其開(kāi)放式架構(gòu)如圖 3.3 所示。
3.4 開(kāi)放式 SYNTEC 加工性能
新代開(kāi)放式數(shù)控系統(tǒng)通過(guò)和 Win CE 系統(tǒng)配合可以達(dá)到每秒執(zhí)行 1000 個(gè)單元的速度,而且可以預(yù)解程序路徑,最多可以達(dá)到 2000 個(gè)單節(jié)的破解量,因此可以使加工速度更為平順,并提供自動(dòng)轉(zhuǎn)角減速及圓弧速度抑制功能,以確保工件精度,確保了SYNTEC-10B 數(shù)控系統(tǒng)具有高速高精的加工性能。
因受限于機(jī)臺(tái)狀況,即使驅(qū)動(dòng)器的位置回路增益調(diào)整至最佳數(shù)值,在實(shí)際加工上仍會(huì)產(chǎn)生伺服落后的問(wèn)題,此狀況尤以在高速加工時(shí)特別嚴(yán)重;因此針對(duì)伺服路后造成工件尺寸內(nèi)縮,而開(kāi)發(fā)出此精度補(bǔ)償功能,確保了 SYNTEC-10B 數(shù)控系統(tǒng)在保持精度的同時(shí)還具有較好的平順性。
模具加工中多使用 CAD/CAM 軟件自動(dòng)生成加工程序,這樣生成的加工程序中存在致使加工路徑不合理的單節(jié)程序語(yǔ)句,SYNTEC-10B 數(shù)控系統(tǒng)提供路徑平滑功能,將軟件產(chǎn)生的加工路徑平滑化,用以提高加工表面的光潔度、加工效率與機(jī)臺(tái)穩(wěn)定度。
CAD/CAM 軟件生成的線性刀具軌跡是非連續(xù)性,對(duì)于加工速度、表面狀況、機(jī)臺(tái)穩(wěn)定度皆會(huì)有一定的影響,尤其是在軟件中設(shè)定的加工精度以及公差不佳的情況下,此問(wèn)題更為嚴(yán)重;高精度軌跡輪廓控制是利用合適的曲線將線性刀具軌跡擬合為連續(xù)軌跡,且在加工速度的規(guī)劃上不再受限于不聯(lián)系的單節(jié),因而可以得到優(yōu)良的加工品質(zhì),使 SYNTEC-10B 數(shù)控系統(tǒng)具有高精軌跡輪廓控制的性能。
機(jī)床操作者只需做“精度優(yōu)先”與“速度優(yōu)先”的選擇,“路徑貼合”與“高平滑性”的等級(jí)選擇,以及選擇 SPA 的開(kāi)啟與關(guān)閉即可控制加工狀況,使得 SYNTEC-10B數(shù)控系統(tǒng)在高速高精度加工中的參數(shù)控制更加簡(jiǎn)化明了。
操作者將檔案放置于外部裝置(USB、網(wǎng)絡(luò)等),保持邊傳輸,邊加工的工作狀態(tài),一方面滿足大型檔案加工的需求;另一方面,操作者能夠在操作上免去了加工程序不斷傳檔的步驟,提高了加工效率。
3.5 控制面板
操作面板和控制器面板是機(jī)床操作人員與數(shù)控系統(tǒng)進(jìn)行信息交互的直接窗口。項(xiàng)目中采用的新代 10B 控制器與 SK4-M 型的銑床面板。新代 10B 系列的控制器采用先進(jìn)的開(kāi)放式架構(gòu)技術(shù),并可以搭載 Mechatrolink-II 串列的通訊控制方式,可以改善傳統(tǒng)脈波式泛用型控制器在多軸運(yùn)動(dòng)控制中各種命令的傳輸時(shí)間差與脈波時(shí)序問(wèn)題,以達(dá)到良好的同步控制并兼顧即時(shí)性;同時(shí)更加精簡(jiǎn)配線,提升擴(kuò)充性以及減少繁雜信號(hào)的干擾。10B 控制器采用的是內(nèi)置嵌入式工業(yè)電腦,配置 10.4 寸液晶顯示器,結(jié)合伺服軸、手輪軸、主軸、內(nèi)建 PLC 及 USB 接口的 CF Card 讀取裝置。
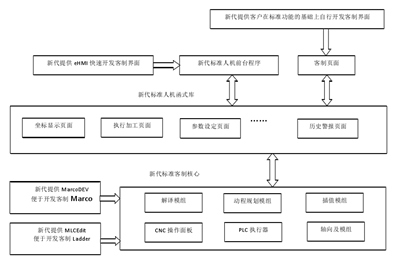
圖 3.3 新代 SYNTEC-10B 數(shù)控系統(tǒng)開(kāi)放式架構(gòu)框圖
該型控制器可以實(shí)現(xiàn) 8 軸伺服控制,具有手輪專用軸,配置有一組 12BIT D/A 輸出接口,而且該控制器可以外接兩個(gè) I/O 模塊(最多可達(dá) 128 點(diǎn)輸入/128 輸出點(diǎn))。控制器構(gòu)建的 USB 接口 CF CARD 卡片閱讀機(jī)具有動(dòng)態(tài)熱插入功能。配備有 128MB的 RAM,可以實(shí)現(xiàn) RS-232、RS422 以及 RS485 的網(wǎng)絡(luò)通訊。新代 10B 控制器具有低價(jià)格、高性能、結(jié)構(gòu)簡(jiǎn)單、易于使用、可靠性高的特點(diǎn)。圖 3.4 與圖 3.5 分別為新代 10B控制器面板的正面圖與背面圖。
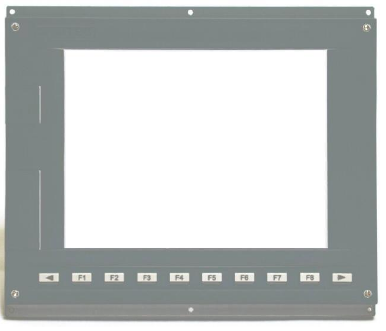
圖 3.4 新代 10B 控制器面板正面圖

圖 3.5 新代 10B 控制器面板背部圖
新代 SK4-M 型的銑床面板是機(jī)械式按鍵面板,具有防油污,耐腐蝕的特點(diǎn),結(jié)合新代標(biāo)準(zhǔn)型鍵盤(pán),使我們獲得便捷的操作環(huán)境。圖 3.6 與圖 3.7 是新代 SK4-M 型銑床面板的正面圖與背部圖。該型面板是基于新代標(biāo)準(zhǔn)鍵盤(pán)而設(shè)計(jì),具有三組旋鈕式開(kāi)關(guān)輸入,獨(dú)立的 Input 點(diǎn)允許應(yīng)用人員用來(lái)自行規(guī)劃。

圖 3.6 新代 SK4-M 型銑床面板正面圖

圖 3.7 新代 SK4-M 型銑床面板背部圖
區(qū)域①是快捷鍵功能區(qū),其中包括 F1-F8、ESC 以及翻頁(yè)鍵,該區(qū)域的快捷鍵與顯示器下方的快捷鍵功能一致。其中的翻頁(yè)鍵用于對(duì)當(dāng)前多于一頁(yè)的程序界面進(jìn)行翻頁(yè)操作,以便操作者瀏覽多個(gè)程序和界面,進(jìn)行相關(guān)的編輯和查看操作。 區(qū)域②是程序代碼編輯區(qū)域,負(fù)責(zé)數(shù)控編程中相關(guān)字符的修改編輯。其中包括 26個(gè)字母鍵組成的字母分區(qū)、10 個(gè)數(shù)字鍵組成的數(shù)字分區(qū)、游標(biāo)移動(dòng)鍵分區(qū)、刪除鍵、換擋鍵、插入鍵等。數(shù)字鍵與字母鍵在指令位置和資料輸入過(guò)程中發(fā)揮作用。游標(biāo)移動(dòng)按鍵用于對(duì)屏幕編輯區(qū)的光標(biāo)進(jìn)行相關(guān)移動(dòng)操作,對(duì)其進(jìn)行精確快速定位,提高編程效率。換擋鍵用于切換按鍵的第二層功能。刪除鍵用于程序編輯中消除誤輸入的詞句程序段。 區(qū)域③是輔助功能區(qū)。其中包括切削液開(kāi)關(guān)、工作燈開(kāi)關(guān)、加工吹氣開(kāi)關(guān)、排屑機(jī)正反轉(zhuǎn)、主軸正反轉(zhuǎn)控制、主軸轉(zhuǎn)速切換、刀庫(kù)正反轉(zhuǎn)等輔助功能。 區(qū)域④是方向鍵區(qū)。手動(dòng)控制軸向移動(dòng),通過(guò)按鍵的組合可以達(dá)到快速移動(dòng)的目的,其中包括 X、Y、Z 三個(gè)軸的正向和負(fù)向移動(dòng)。 區(qū)域⑤是操作模式區(qū),其中包括原點(diǎn)模式、MPG 寸動(dòng)模式、自動(dòng)加工模式、手動(dòng)寸動(dòng)模式、單節(jié)執(zhí)行、選擇停止等模式。 區(qū)域⑥是開(kāi)關(guān)機(jī)分區(qū)。其中包括機(jī)床上電與斷電按鍵,程序的啟動(dòng)與停止按鍵以及轉(zhuǎn)速的倍率選擇旋鈕、急停按鈕等。該分區(qū)的功能主要是機(jī)床的啟動(dòng)和停止,控制加工程序的動(dòng)作等。在操作失誤以及出現(xiàn)安全隱患時(shí),緊急停止按鈕能夠切斷所有的機(jī)電控制;這種情況下,控制器處于供電狀態(tài),其他諸如伺服、加工液、主軸等重電都被切斷,最終達(dá)到保護(hù)工作人員以及機(jī)械設(shè)備的目的。
3.6 本章小結(jié)
本章對(duì)新代 SYNTEC 數(shù)控系統(tǒng)進(jìn)行了整體性的描述,論述了新代數(shù)控系統(tǒng)二次開(kāi)發(fā)所利用的模擬仿真軟件的功能,對(duì)軟件安裝過(guò)程中的特殊要求進(jìn)行了特別說(shuō)明,保證了課題研究的軟件基礎(chǔ)。對(duì)新代 10B 控制器的架構(gòu)進(jìn)行了歸納總結(jié),通過(guò)對(duì)開(kāi)放式數(shù)控系統(tǒng)的分析,總結(jié)了新代開(kāi)放式系統(tǒng)的性能優(yōu)勢(shì),提出了新代系統(tǒng)的開(kāi)放式架構(gòu)。分析了新代控制面板,它的設(shè)計(jì)合理與否直接影響到數(shù)控系統(tǒng)的人機(jī)交互性。
投稿箱:
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多本專題新聞
名企推薦







專題點(diǎn)擊前十
| 更多

