


摘要: X62W 萬能銑床電氣控制系統(tǒng)采用繼電接觸器控制, 存在線路復(fù)雜、可靠性差、故障率高等缺點(diǎn)。PLC 與繼電接觸器控制系統(tǒng)相比, 具有可靠性高、編程靈活、柔性好、抗干擾能力強(qiáng)等特點(diǎn), 特別適合應(yīng)用于自動(dòng)控制系統(tǒng)的開發(fā)和應(yīng)用, 是電氣控制系統(tǒng)智能化控制的理想工具。改造后的萬能銑床, 可提高電氣控制系統(tǒng)的穩(wěn)定性和可靠性, 提高產(chǎn)品質(zhì)量和效率。論文利用S7-200 PLC對(duì)X62W 型萬能銑床電氣控制系統(tǒng)進(jìn)行技術(shù)改造設(shè)計(jì)。并詳細(xì)介紹了改造的每一個(gè)環(huán)節(jié)。
關(guān)鍵詞: PLC; 萬能銑床; 電氣控制; 梯形圖
0 引言
銑床型號(hào)比較多, X62W 萬能銑床在國(guó)內(nèi)是應(yīng)用最廣泛的一種多用途機(jī)床, 電氣控制線路是普通機(jī)床中較復(fù)雜一種。
X62W 萬能銑床由于電氣控制線路觸點(diǎn)多、線路復(fù)雜、故障率高、檢修周期長(zhǎng), 而且故障的查找與排除非常困難的, 嚴(yán)重地影響生產(chǎn)效率。隨著現(xiàn)代制造業(yè)技術(shù)的發(fā)展, 對(duì)生產(chǎn)設(shè)備和自動(dòng)生產(chǎn)線的控制系統(tǒng)需要更高的可靠性與靈活性, 需要采用新技術(shù)控制取代傳統(tǒng)的控制系統(tǒng)。基于這些問題, 本文采用S7-200 型PLC 對(duì)X62W 型萬能銑床的電氣控制系統(tǒng)進(jìn)行技術(shù)改造。PLC 具有可靠性高、柔性好、編程靈活、開發(fā)周期短以及故障自診斷等特點(diǎn), 特別適合應(yīng)用于自動(dòng)控制系統(tǒng)的開發(fā)和應(yīng)用。
1 、萬能銑床電氣控制電路
X62W 萬能銑床電氣控制電路由主電路、控制電路和輔助電路及保護(hù)環(huán)節(jié)組成。圖1 是X62W 萬能銑床的電氣控制系統(tǒng)圖, 硬件改造和軟件設(shè)計(jì)論述如下:
1.1 主電路
主軸電動(dòng)機(jī)M1: 任務(wù)是拖動(dòng)主軸帶動(dòng)銑刀進(jìn)行銑削加工, 其正反轉(zhuǎn)通過組合開關(guān)來實(shí)現(xiàn)。KMl 是Ml 的起動(dòng)接觸器, SA3 是主軸換向開關(guān)。
進(jìn)給電動(dòng)機(jī)M2: 任務(wù)是通過操縱手柄和機(jī)械離合器的配合后進(jìn)行工作臺(tái)前后、左右、上下6 個(gè)方向的進(jìn)給運(yùn)動(dòng)和快速移動(dòng), 其正反轉(zhuǎn)是由接觸器KM3、KM4 來實(shí)現(xiàn)的, 6 個(gè)方向的運(yùn)動(dòng)為聯(lián)鎖控制。
冷卻泵電動(dòng)機(jī)M3: 任務(wù)是供應(yīng)切削液。主軸電動(dòng)機(jī)Ml 和冷卻泵電動(dòng)機(jī)M3 采用順序控制, 只有當(dāng)Ml 起動(dòng)后M3 才能起動(dòng), 由轉(zhuǎn)換開關(guān)SA3 控制。
M1、M2、M3 三臺(tái)電動(dòng)機(jī)共用熔斷器FU 作短路保護(hù), 熱繼電器FRl、FR2、FR3 分別是M1、M2、M3 三臺(tái)電動(dòng)機(jī)的過載保護(hù)。
1.2 控制電路
控制電路主要由圓工作臺(tái)的控制, 下面以工作臺(tái)前后、上下進(jìn)給控制分析為例:
工作臺(tái)的前后和上下運(yùn)動(dòng)是由垂直和橫向手柄控制, 該手柄有五個(gè)位置: 有上、下、前、后、中間五個(gè)位置, 中間位置為停位。由十字槽保證手柄在任意時(shí)刻只能處于一種
位置, 當(dāng)手柄扳向中間位置時(shí), 限位開關(guān)SQ3 和SQ4 均未被壓合, 進(jìn)給控制電路處于斷開狀態(tài), 當(dāng)手柄扳向前或下位置時(shí),由壓合限位開關(guān)SQ3 、SQ4 控制工作臺(tái)向前或下移動(dòng)。
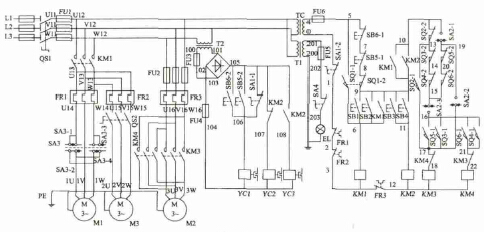
圖1 X62W 萬能銑床電氣控制原理圖
將手柄扳到向上(或向后)位,壓下開關(guān)SQ4, 接觸器KM4 得電吸合, 進(jìn)給電動(dòng)機(jī)M2 反轉(zhuǎn),工作臺(tái)做向上(或向后)運(yùn)動(dòng)。KM4線圈得電路徑為:10→SA2-1→19→SQ5-2→
20→SQ6-2→15→SA2-3→16→SQ4-1→21→KM3 常閉觸點(diǎn)→22→KM4 線圈。
若將手柄扳到向下(或向前)位,SQ3 被壓下, 接觸器KM3 得電吸合, 進(jìn)給電動(dòng)機(jī)M2 正轉(zhuǎn),帶動(dòng)工作臺(tái)做向下(或向前)運(yùn)動(dòng)。
1.3 輔助電路及保護(hù)環(huán)節(jié)
輔助電路及保護(hù)環(huán)節(jié)包括冷卻泵電動(dòng)機(jī)控制和照明電路控制。因?yàn)橹鬏S電動(dòng)機(jī)Ml 和冷卻泵電動(dòng)機(jī)M3 采用順序控制, 主軸電動(dòng)機(jī)啟動(dòng)后, 扳動(dòng)組合開關(guān)QS2 可控制冷卻泵電動(dòng)機(jī)M3。銑床的照明由變壓器T 輸出36V的安全電壓, 由開關(guān)SA4 控制。熔斷器FU5 作為照明電路的短路保護(hù)。
2、 電氣控制系統(tǒng)的PLC 硬件改造及軟件設(shè)計(jì)
對(duì)X62W 萬能銑床進(jìn)行電氣控制線路的PLC 改造時(shí), 主要是改造控制電路, 而對(duì)電源電路、主電路及照明電路可保持不變。去掉變壓器TC 的輸出及整流器的輸出部分, 采用PLC 控制, 為了確保各種聯(lián)鎖功能, 需要將位置開關(guān)SQ1SQ6、按鈕開關(guān)SB1~SB6、分別接入PLC 的輸入端; 換刀開關(guān)SA1 和圓形工作臺(tái)轉(zhuǎn)換開關(guān)SA2 分別用其一對(duì)常開和常閉觸頭接入PLC 的輸入端子。輸出器件有三個(gè)不同等級(jí)的電壓, 一個(gè)是接觸器使用的220V 交流電壓, 另一個(gè)是電磁離合器使用的24V 直流電壓, 還有一個(gè)是照明使用的36V 交流電壓。把PLC 的輸出口分成三組連接點(diǎn)。
2.1 硬件改造
X62W 萬能銑床控制系統(tǒng)的輸入點(diǎn)數(shù)為16點(diǎn), 輸出點(diǎn)數(shù)為9 點(diǎn), 根據(jù)輸入輸出口的數(shù)量, 可選擇S7-200 CPU226 型PLC。所有的電器元件還可采用改造前的型號(hào), 電器元件的安裝位置也不變。X62W 萬能銑床各個(gè)輸入/輸出點(diǎn)的PLC 地址分配如表1 所示。X62W 萬能銑床的PLC I/O 接線如圖2 所示。
表1 P LC I/O 地址分配表

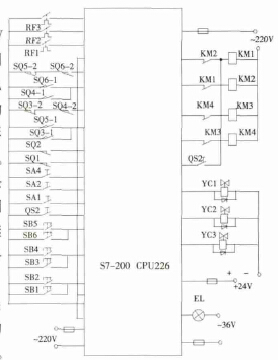
圖2 PLC I/O 接線圖
2.2 軟件設(shè)計(jì)
根據(jù)X62W萬能銑床的控制電路, 設(shè)計(jì)該電氣控制系統(tǒng)的PLC 控制梯形圖,如圖3 所示。該程序共有9 條支路, 在梯形圖中已反映了原繼電器電路中的各種邏輯關(guān)系。第1 支路:是主軸電動(dòng)機(jī)的起動(dòng)與停止控制。當(dāng)按下按鈕SB1(或SB2)、SB5(或SB6) 及位置開關(guān)SQ1 接入PLC 的I0.0、I0.2、I0.7 輸入接點(diǎn)。主軸起動(dòng)后, 通過輸出繼電器Q0.將進(jìn)給控制電路電源接通。第2 支路:是主軸制動(dòng)及更換銑刀功能。反映KM2 及YC3的工作邏輯關(guān)系, 當(dāng)需要快速停車時(shí), 按下SB5 或SB6 時(shí),I0.2 常開觸點(diǎn)閉合,Q1.0 輸出,當(dāng)KM2 常閉觸頭斷開,使電磁離合器YC2失電,同時(shí)電磁離合器YC3 得電,抱緊主軸;當(dāng)更換銑刀時(shí),按下松緊開關(guān)SA1(接點(diǎn)I0.4),將主軸抱緊,換刀很方便,與此同時(shí),I0.4 的常閉觸頭斷開,切斷控制電路電源。

圖3 PLC 梯形圖
第3 支路: 要表達(dá)工作臺(tái)六個(gè)方向的進(jìn)給、進(jìn)給沖動(dòng)及圓工作臺(tái)的工作邏輯關(guān)系。這是一支非常重要的支路, 也是PLC 程序設(shè)計(jì)的重點(diǎn)和難點(diǎn): ①圓工作臺(tái)的控制: 按下主軸起動(dòng)按鈕SBl 或SB2, 接觸器KMl 得電吸合, 因?yàn)镾Q2-2(對(duì)應(yīng)接點(diǎn)I1.0)、SQ3-2(對(duì)應(yīng)接點(diǎn)I1.2)、SQ4-2(對(duì)應(yīng)接點(diǎn)I1.2)、SQ6-2(對(duì)應(yīng)接點(diǎn)I1.4)、SQ5-2(對(duì)應(yīng)接點(diǎn)I1.4)、SA2-2(對(duì)應(yīng)接點(diǎn)I0.5)、KM4(對(duì)應(yīng)接點(diǎn)Q0.4)常閉觸點(diǎn)閉合,主軸電動(dòng)機(jī)Ml 起動(dòng),接觸器KM3 得電,進(jìn)給電動(dòng)機(jī)M2 起動(dòng)正轉(zhuǎn)。工作臺(tái)沿一個(gè)方向做旋轉(zhuǎn)運(yùn)動(dòng);②工作臺(tái)向右運(yùn)動(dòng)的控制:當(dāng)壓下限位開關(guān)SQ5-1(對(duì)應(yīng)接點(diǎn)I1.1),因?yàn)镾Q2-2(對(duì)應(yīng)接點(diǎn)I1.0)、SQ3-2(對(duì)應(yīng)接點(diǎn)I1.2)、SQ4-2 (對(duì)應(yīng)接點(diǎn)I1.2)、SA2-3 (對(duì)應(yīng)接點(diǎn)I0.5)、KM4(對(duì)應(yīng)接點(diǎn)Q0.4)常閉觸點(diǎn)閉合,正向接觸器KM3 得電,進(jìn)給電動(dòng)機(jī)M2 起動(dòng)正轉(zhuǎn),工作臺(tái)向右運(yùn)動(dòng);③工作臺(tái)做向下(或向前)運(yùn)動(dòng)的控制:當(dāng)壓下限位開關(guān)SQ3-1 (對(duì)應(yīng)接點(diǎn)I1.1), 因?yàn)镾A2-1 (對(duì)應(yīng)接點(diǎn)I0.5)、SQ5-2(對(duì)應(yīng)接點(diǎn)I1.4)、SQ6-2(對(duì)應(yīng)接點(diǎn)I1.4)、SA2-3(對(duì)應(yīng)接點(diǎn)I0.5)、KM4(對(duì)應(yīng)接點(diǎn)Q0.4)常閉觸點(diǎn)閉合,正向接觸器KM3 得電, 進(jìn)給電動(dòng)機(jī)M2 起動(dòng)正轉(zhuǎn), 工作臺(tái)做向下(或向前)運(yùn)動(dòng);④進(jìn)給變速的沖動(dòng)控制:壓下開關(guān)SQ2 ,SQ2-2 先斷開,SQ2-1 后接通,SA2-l (對(duì)應(yīng)接點(diǎn)I0.5)、SQ5-2(對(duì)應(yīng)接點(diǎn)I1.4)、SQ6-2(對(duì)應(yīng)接點(diǎn)I1.4)、SQ4-2(對(duì)應(yīng)接點(diǎn)I1.2)、SQ3-2(對(duì)應(yīng)接點(diǎn)I1.2)、SQ2-1(對(duì)應(yīng)接點(diǎn)I1.0)、KM4 (對(duì)應(yīng)接點(diǎn)Q0.4) 常閉觸點(diǎn)閉合, 接觸器KM3 得電, 進(jìn)給電動(dòng)機(jī)M2 起動(dòng)正轉(zhuǎn)。
第4 支路: 反轉(zhuǎn)控制。工作臺(tái)向左移動(dòng)的控制。壓下限位開關(guān)SQ6-1(對(duì)應(yīng)接點(diǎn)I1.3),因?yàn)镾Q2-2(對(duì)應(yīng)接點(diǎn)I1.0)、SQ3-2(對(duì)應(yīng)接點(diǎn)I1.2)、SQ4-2(對(duì)應(yīng)接點(diǎn)I1.2)、
SA2-3(對(duì)應(yīng)接點(diǎn)I0.5)、KM3(對(duì)應(yīng)接點(diǎn)Q0.3)常閉觸點(diǎn)閉合, 正向接觸器KM4 得電, 進(jìn)給電動(dòng)機(jī)M2 起動(dòng)反轉(zhuǎn),工作臺(tái)向左移動(dòng)。常閉觸頭串聯(lián)在左右進(jìn)給控制電路中, 可實(shí)現(xiàn)聯(lián)鎖。工作臺(tái)做向上(或向后)運(yùn)動(dòng)的控制。壓下限位開關(guān)SQ4-1(對(duì)應(yīng)接點(diǎn)I1.3),輸出Q0.4,因?yàn)镾A2-1(對(duì)應(yīng)接點(diǎn)I0.5)、SQ5-2 (對(duì)應(yīng)接點(diǎn)I1.4)、SQ6-2 (對(duì)應(yīng)接點(diǎn)I1.4)、SA2-3(對(duì)應(yīng)接點(diǎn)I0.5)、KM3(Y 對(duì)應(yīng)接點(diǎn)3)常閉觸點(diǎn)閉合,正向接觸器KM4 得電,進(jìn)給電動(dòng)機(jī)M2 反轉(zhuǎn)。工作臺(tái)做向上(或向后)運(yùn)動(dòng)。電路同樣可實(shí)現(xiàn)聯(lián)鎖。第6 支路: 是冷卻泵電動(dòng)機(jī)M3 的起停控制電路,由開關(guān)QS2(對(duì)應(yīng)接點(diǎn)I0.3)控制,該電路與主軸電動(dòng)機(jī)之間采用順序控制: 主軸電路起動(dòng)后, 冷卻泵才能起動(dòng);主軸停止, 它隨著停止。
第5、7、8 支路: 工作臺(tái)快速進(jìn)給起動(dòng)控制。可通過操作快速移動(dòng)按鈕SB3(或SB4)對(duì)應(yīng)輸入接點(diǎn)I0.1,使KM2 得電, 控制Q0.6、Q0.7 的輸出, 分別接通快速電磁離合器YC3 和切斷常速電磁離合器YC2, 再配合各個(gè)方向的操縱手柄, 實(shí)現(xiàn)工作臺(tái)向相應(yīng)方向的快速移動(dòng)。第9 支路: 是照明控制。由轉(zhuǎn)換開關(guān)SA4 (對(duì)應(yīng)輸入接點(diǎn)I0.6) 控制Q0.0 實(shí)現(xiàn)。
對(duì)輸入常閉接點(diǎn)的編程要特別引起注意, 否則將造成編程錯(cuò)誤。如圖2 中的SQ1、SQ2、SQ3-2、SQ4-2、RF1、RF2、RF3 常閉接點(diǎn)如不改成常開接點(diǎn), 那么常閉接點(diǎn)和PLC 的公共端COM 就會(huì)接通,在PLC 內(nèi)部電源作用下輸入繼電器(I0.7、I1.0、I1.2、I1.4、I1.5、I1.6、I1.7) 線圈也接通,常閉接點(diǎn)已斷開,輸出繼電器是不會(huì)動(dòng)作的。解決這類問題的方法可把常閉接點(diǎn)改為常開接點(diǎn), 這樣就可采用常規(guī)的方法畫梯形圖了,采用這種方法比較簡(jiǎn)單,也不易出錯(cuò)。
3 、結(jié)束語
X62W 萬能銑床是國(guó)內(nèi)廣泛使用的機(jī)械加工機(jī)床。由于電氣控制系統(tǒng)觸點(diǎn)多、線路復(fù)雜、故障率高、檢修周期長(zhǎng), 給生產(chǎn)與維護(hù)帶來諸多不便, 嚴(yán)重地影響生產(chǎn)。若用PLC 改造電氣控制系統(tǒng), 不但可保證原電路的工作邏輯關(guān)系和整機(jī)的安全性能, 而且機(jī)床工作穩(wěn)定、可靠、抗干擾能力很強(qiáng), 大大減輕控制系統(tǒng)故障等優(yōu)點(diǎn)。可取得較好的經(jīng)濟(jì)效益。
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com

查")
- 2025年5月 新能源汽車銷量情況
- 2025年5月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年5月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年5月 軸承出口情況
- 2025年5月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年4月 新能源汽車銷量情況
- 2025年4月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年4月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年4月 軸承出口情況
- 2025年4月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年4月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年1月 新能源汽車銷量情況
- 機(jī)械加工過程圖示
- 判斷一臺(tái)加工中心精度的幾種辦法
- 中走絲線切割機(jī)床的發(fā)展趨勢(shì)
- 國(guó)產(chǎn)數(shù)控系統(tǒng)和數(shù)控機(jī)床何去何從?
- 中國(guó)的技術(shù)工人都去哪里了?
- 機(jī)械老板做了十多年,為何還是小作坊?
- 機(jī)械行業(yè)最新自殺性營(yíng)銷,害人害己!不倒閉才
- 制造業(yè)大逃亡
- 智能時(shí)代,少談點(diǎn)智造,多談點(diǎn)制造
- 現(xiàn)實(shí)面前,國(guó)人沉默。制造業(yè)的騰飛,要從機(jī)床
- 一文搞懂?dāng)?shù)控車床加工刀具補(bǔ)償功能
- 車床鉆孔攻螺紋加工方法及工裝設(shè)計(jì)
- 傳統(tǒng)鉆削與螺旋銑孔加工工藝的區(qū)別