



開放式數控系統在實踐中的應用探究
2018-6-12 來源:西安職業技術學院機電工程系 作者:王利峰;代美泉 李俊
摘要:隨著計算機及網絡技術的不斷發展,數控系統的結構形式也在不斷的變化,系統控制結構也出現多樣化,不同結構的開放式數控系統的應用也各有特點。通過查閱開放式數控系統的文獻資料,對開放式數控系統的定義、結構及特點進行了研究,結合開放式系統的發展現狀,在實踐中應用。
關鍵詞:開放式;數控系統;應用;
1、數控系統“開放”的主要原因
1.1 市場的客觀需要
在現代的智能制造生產中,市場上機床設備的種類繁多,但大多數機床和系統生產廠家設計和生產的數控機床是功能性的數控機床,其硬件結構比較傳統,控制過程比較單一,面向的用戶也受到限制。而實際使用者需要數控機床生產廠家根據自己的生產需求進行設計和定制數控機床,來滿足自己的生產要求。在這種市場需求下,就要求數控機床要改變傳統的結構形式,具備一定的“開放性”,使用戶可以根據自己的生產需求可以自行擴展、調整和修改數控系統的功能,以滿足市場要求.
1.2 機床和系統制造商的共同推動作用
目前在市場上見到的數控機床,大部分在生產制造過程中,機床和數控系統是分開生產的。數控系統生產企業在不斷地豐富自己系統的功能,而機床制造商也在不斷的更新自己的產品。機床廠家向數控系統制造商購買不同型號和功能的數控系統來組成不同類型和規格的數控機床,然后推向市場。而在實際使用中,數控機床的功能不能完全滿足用戶需求,加之數控機床價格比較昂貴,系統功能結構不能隨意更改,所以系統和機床的“開放”就尤為重要。
2、 數控系統對于“開放”的定義
由于開放式數控系統目前處于研究階段,國內外對于數控系統的“開放性”尚未形成統一的定義。凡是可以在多個平臺上使用,具有一定的交互界面,并且符合系統應用規范,能夠在多個系統間相互操作的控制系統,可以說明這個系統具有“開放性”。其實質就是改變傳統數控機床的硬件結構形式,在通用的 PC 上通過軟件程序來實現對機床運動部件的控制。
3、 開放式數控系統的結構
數控系統結構的“開放”可以從硬件和軟件開放,也可以從用戶界面到控制結構全面開放,利用計算機的軟硬件及網絡資源,使用高級語言編制驅動程序,實現開放性。目前開放式數控系統的主要結構有兩種:①PC+CNC 主板:把一塊通用 PC 主板嵌入到傳統的 CNC 機床中,PC 主板主要實時運行非控制功能,CNC 主要運行實現以坐標軸為主的實時控制功能。②PC+專用運動控制器:把專用運動控制卡插入計算機標準插槽中作實時控制用,而 PC 機主要用作處理非實時控制功能。其中第二種結構,能充分發揮其計算機處理速度快,具有人機接口好的功能特點,也成為目前國內開放式數控系統應用的主流結構。
4 、開放式數控系統的基本特征
4.1 模塊化
采用分布式控制形式,系統功能模塊化和體系結構模塊化的控制結構。其中系統功能模塊化是用戶根據自己的使用要求選擇不同的系統功能,體系結構模塊化是使用者可以改變控制系統的硬件結構形式。其結構是可移植和直觀的。
4.2 標準化
所謂的“開放”是在一定標準規范下進行的開放,并不是隨意無限制的開放。標準化的前提是應具有模塊化,不同的系統生產廠家必須在其滿足標準化的前提下才能夠對其產品及結構形式進行開放。
4.3 可重構性
數控系統既然要“開放”,就應當允許用戶可以進行第二次設計開發。用戶可以根據需要方便地實現界面的設計、硬件結構更改、參數的設置等,以便滿足一個系統多種功能用途。
4.4 網絡化
現代的開放性數控系統是以網絡化通訊和資源共享作為手段,通過設備的聯網功能來實現系統的開放性。
5 、開放式系統在實踐中的應用
5.1 PC+運動控制器的結構連接
NC 系統的硬件是 CNC 系統工作的前提。數控系統硬件結構的開放性主要體現在其開放的硬件結構設計的技術細節和結構參數,同時結構的可擴展性也更為重要,即可以允許使用者按照一定的標準自行設計、選購和更改原有系統的硬件結構,并以此為前提進行二次開發,而且在其開發的過程中也更為便捷。
PC+運動控制器的硬件結構主要有 PC 機、專用運動控制器、伺服驅動器、伺服電機等組成。其中運動控制器,是利用高性能微處理器及大規模可編程器件實現多個電機的多軸協調控制,將實現運動控制的底層軟件和硬件集成在一起,使其具有電機控制所需的各種速度、位置控制功能。目前開放式運動控制器主要有美國 Delta Tau 公司生產的 PMAC 系列運動控制器、美國 Dali 公司的 DNIC 系列運動控制器、深圳固高科技有限公司的 GT 系列運動控制器等。為了使用更為方便,考慮到通用性和系統軟硬件的兼容性問題,結合不同運動控制器的本身特點,選用“PC+運動控制器”的開放式數控系統結構形式。由于通用 PC機的硬件性能配置能夠完全滿足數控系統的使用,所以選擇什么類型的專用運動控制器就顯得尤為重要。在實踐中,選用深圳固高公司生產的 GT-400-SV 專用運動控制器作為控制核心,如圖 1 控制系統連接圖所示,把運動控制卡放入到 PC 標準插槽中,完成對開放式數控系統的硬件結構連接。通過高級編程語言指令驅動伺服電機的執行機構,實現預定的運動目標。
GT-400-SV 運動控制器的特點:GT-400-SV 運動控制器是一款基于 PCI 總線的運動控制器,主要用于控制步進電機和伺服系統。它通過 DSP 和 FPGA 進行運動規劃,支持點位控制和連續軌跡控制,可以輸出脈沖或模擬量指令。GT-400-SV 運動控制器可以自由設定加減速、S 型曲線平滑等參數,協助用戶設計出最適合機械結構的運動規劃。通過 GT-400-SV 運動控制器提供的 VC、VB、C#、Labview 等開發環境下的庫文件,用戶可以輕松實現對控制器的編程,構建自動化控制系統。
圖 1采用運動控制器組成的控制系統連接圖
5.2 開放式系統控制過程
PC 機向運動控制器發出操作命令,運動控制器根據控制系統反饋回的信息,直接進行實時的運動操作,并控制伺服驅動器。控制器控制電動機的過程為:打開運動控制卡并初始化,設置運動參數,執行運動控制程序,顯示運動狀態,檢測運動狀態是否正確、關閉運動控制卡。通過如圖 2 所示的控制過程流程圖,可以直觀地看到整個開放式數控系統控制的全過程。
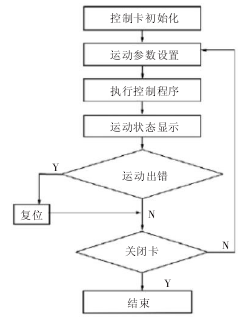
圖 2 控制過程流程圖
6、 結論
隨著數控技術的發展,開放式數控技術涉及更為廣泛,開放性數控系統必然會成為一個重要的發展方向,開放性數控系統的結構也將實現多元化,面向的使用對象也更加開放化,通過對開放式數控系統的體系結構、系統硬件結構設計和控制原理等方面進行探討,更加速了開放式數控系統的發展和應用研究。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

