



工業(yè)機器人運動軸與坐標(biāo)系的確定
2021-6-25 來源: 威海職業(yè)學(xué)院 作者: 韓鴻鸞
1、 機器人運動軸
工業(yè)機器人在生產(chǎn)中,一般需要配備除了自身性能特點的外圍設(shè)備,如轉(zhuǎn)動工件的回轉(zhuǎn)臺,移動工件的移動臺等。這些外圍設(shè)備的運動和位置控制都需要與工業(yè)機器人相配合并要求相應(yīng)精度。通常機器人運動軸按其功能可劃分為機器人軸、基座軸和工裝軸,基座軸和工裝軸統(tǒng)稱外部軸。
常見工業(yè)機器人本體運動軸的定義

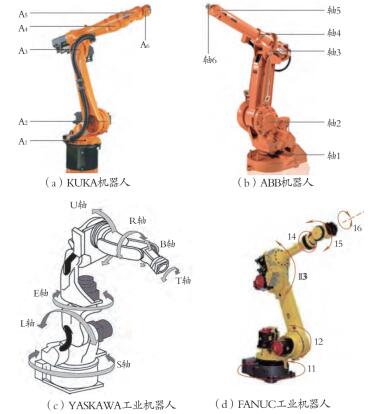
圖 1 典型機器人各運動軸
機器人軸是指操作本體的軸,屬于機器人本身,目前商用的工業(yè)機器人大多以 8 軸為主。基座軸是使機器人移動軸的總稱,主要指行走軸(移動滑臺或?qū)к墸9ぱb軸是除機器人軸、基座軸以外軸的總稱,指使工件、工裝夾具翻轉(zhuǎn)和回轉(zhuǎn)的軸,如回轉(zhuǎn)臺、翻轉(zhuǎn)臺等。實際生產(chǎn)中常用的是 6 關(guān)節(jié)工業(yè)機器人,該操作機有 6 個可活動的關(guān)節(jié)(軸)。常見工業(yè)機器人本體運動軸的定義附表與圖 1 為常見工業(yè)機器人本體運動軸的定義,值得注意的是,不同的工業(yè)機器人本體運動軸的定義也不同。用于保證末端執(zhí)行器達(dá)到工作空間任意位置的軸稱為基本軸或主軸 ; 用于實現(xiàn)末端執(zhí)行器任意空間姿態(tài)的軸,稱為腕部軸或次軸 ; 圖 2 是 YASKAWA 工業(yè)機器人各運動軸的關(guān)系。

圖 2 YASKAWA 工業(yè)機器人各運動軸的關(guān)系
2、 機器人坐標(biāo)系確定
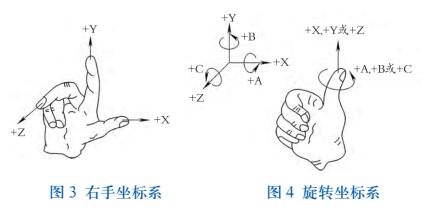
機器人程序中所有點的位置都和坐標(biāo)系關(guān)聯(lián),同時這個坐標(biāo)系也可能和另一個坐標(biāo)系關(guān)聯(lián)。機器人的各種坐標(biāo)系都由正交的右手定則來決定,如圖 3 所示。當(dāng)圍繞平行于 X 、Y 、Z 軸線的各軸旋轉(zhuǎn)時,分別定義為 A 、B 、C 。A 、B 、C 的正方向分別是 X 、Y 、Z 正方向上右手螺旋前進的方向(見圖 4)。
常用的坐標(biāo)系是絕對坐標(biāo)系、機座坐標(biāo)系、機械接口坐標(biāo)系和工具坐標(biāo)系。
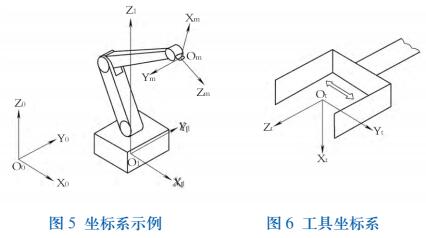
(1)絕對坐標(biāo)系與機器人的運動無關(guān),以地球為參照系的固定坐標(biāo)系(見圖 5),符號為 O0、X0、Y0、Z0。原點 O0、+X0 軸由用戶根據(jù)需要來確定 ;+Z0 軸與重力加速度的矢量共線,但方向相反。
(2)機座坐標(biāo)系是以機器人機座安裝平面為參照系的坐標(biāo)系,符號為 O1、X1、Y1、Z1。原點 O1 由機器人制造廠規(guī)定 ;+Z1 軸垂直于機器人機座安裝面,指向機器人機體 ;X1 軸方向由原點指向機器人工作空間中心點 Cw(見 GB /T12644—2001)在機座安裝面上的投影。當(dāng)由于機器人的構(gòu)造不能實現(xiàn)此約定時,X1 軸的方向可由制造廠規(guī)定。
(3)機械接口坐標(biāo)系是以機械接口為參照系,符號為 Om、Xm、Ym、Zm。原點 O m 是機械接口的中心 ;+Zm 軸的方向垂直于機械接口中心,并由此指向末端執(zhí)行器 ;+Xm 軸由機械接口平面和 X1、Z1 平面(或平行于 X1、Z1 的平面)的交線來定義,同時機器人的主、副關(guān)節(jié)軸處于運動范圍的中間位置。當(dāng)機器人構(gòu)造不能實現(xiàn)此約定時,應(yīng)由制造廠規(guī)定主關(guān)節(jié)軸位置。+Xm 軸的指向遠(yuǎn)離 Z1 軸。
(4)工具坐標(biāo)系以安裝在機械接口上的末端執(zhí)行器為參照系(見圖 6),符號為 Ot、Xt、Yt、Zt。原點 Ot 是工具中心點(TCP);+Zt 軸與工具有關(guān),通常是工具指向 ; 在平板式夾爪型夾持器夾持時,+Yt 是手指運動平面的方向。
3、工業(yè)機器人常用坐標(biāo)系
(1)基坐標(biāo)系( BaseCoordinate System),又稱為機座坐標(biāo)系,位于機器人基座。如圖 5 所示,它是最便于機器人從一個位置移動到另一個位置的坐標(biāo)系。基坐標(biāo)系在機器人基座中有相應(yīng)的零點,這使固定安裝機器人的移動具有可預(yù)測性。在正常配置的機器人系統(tǒng)中,工人可通過控制桿進行該坐標(biāo)系的移動。
(2)世界坐標(biāo)系(WorldCoordinate System),又稱為大地坐標(biāo)系或絕對坐標(biāo)系。如果機器人安裝在地面,在基坐標(biāo)系下示教編程很容易,但當(dāng)機器人吊裝時,機器人末端移動直觀性差,因而示教編程較為困難。另外,如果兩臺或多臺機器人共同協(xié)作時,例如,一臺安裝于地面,另一臺倒置,倒置機器人的基坐標(biāo)系也將上下顛倒(見圖 7)。當(dāng)分別在兩臺機器人的基坐標(biāo)系 A 、B中進行運動控制時,很難預(yù)測相互協(xié)作運動的情況。此時,可以定義一個共同的世界坐標(biāo)系 C 取而代之。若無特殊說明,單臺機器人世界坐標(biāo)系
和基坐標(biāo)系是重合的。
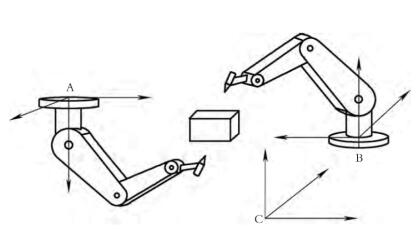
圖 7 世界坐標(biāo)系
(3)用戶坐標(biāo)系(UserCoordinate System),機器人可以和不同的工作臺或夾具配合工作,在每個工作臺上建立一個用戶坐標(biāo)系。機器人大部分采用示教編程的方式,步驟繁瑣,對于相同工件,若放置在不同工作臺進行操作,不必重新編程,只需相應(yīng)地變換到當(dāng)前用戶坐標(biāo)系下。用戶坐標(biāo)系在基坐標(biāo)系或者世界坐標(biāo)系下建立。
(4)工件坐標(biāo)系(ObjectCoordinate System)與工件相關(guān),通常最適于對機器人進行編程。工件坐標(biāo)系對應(yīng)工件,它定義工件相對于大地坐標(biāo)系(或其他坐標(biāo)系)的位置。
工件坐標(biāo)系擁有特定附加屬性,主要用于簡化編程。他擁有兩個框架 : 用戶框架(與大地基座相關(guān))和工件框架(與用戶框架相關(guān))。機器人可以擁有若干工件坐標(biāo)系,表示不同工件,或者表示同一工件在不同位置的若干狀態(tài)。對機器人進行編程就是在工件坐標(biāo)系中創(chuàng)建目標(biāo)和路徑,重新定位工作站中的工件時,只需更改工件坐標(biāo)系的位置,所有路徑將隨之更新。允許操作以外軸或傳送導(dǎo)軌移動的工件,因為整個工件可連同其路徑一起移動。
(5)置換坐標(biāo)系(Displacement CoordinateSystem)又稱為位移坐標(biāo)系,有時需要對同一工件、同一段軌跡在不同工位上加工,為了避免每次重新編程,可以定義一個置換坐標(biāo)系。置換坐標(biāo)系基于工件坐標(biāo)系定義。如圖 8 所示,當(dāng)置
坐標(biāo)系被激活后,程序中的所有點都將被置換。
(6)腕坐標(biāo)系(WristCoordinate System)和工具坐標(biāo)系都是用來定義工具方向的。在簡單應(yīng)用中,腕坐標(biāo)系可以定義為工具坐標(biāo)系,兩者重合。腕坐標(biāo)系的 Z 軸和機器人的第 6 根軸重合,如圖 9 所示,坐標(biāo)系原點位于末端法蘭盤中心,X 軸方向與法蘭盤上標(biāo)識孔的方向相同或相反,Z 軸垂直向外,Y 軸符合右手法則。
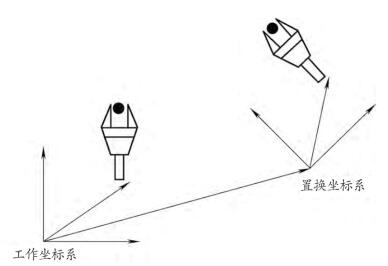
圖 8 置換坐標(biāo)系
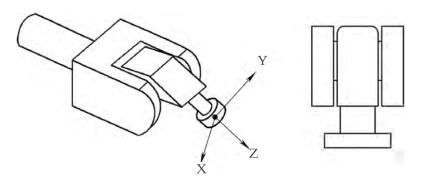
圖 9 腕坐標(biāo)系
(7)工具坐標(biāo)系(ToolCoordinate System)安裝在末端法蘭盤上的工具需要在其中心點(TCP)定義一個工具坐標(biāo)系,通過坐標(biāo)系的轉(zhuǎn)換,可以操作機器人在工具坐標(biāo)系下運動,以方便操作。如果工具磨損或更換,只需重新定義工具坐標(biāo)系,而不用更改程序。工具坐標(biāo)系建立在腕坐標(biāo)系下,即兩者之間的相對位置和姿態(tài)是確定的。
(8)關(guān)節(jié)坐標(biāo)系(J ointCoordinate System)用來描述機器人每個獨立關(guān)節(jié)的運動,關(guān)節(jié)類型可能不同( 如移動關(guān)節(jié)、轉(zhuǎn)動關(guān)節(jié)等)。若將機器人末端移動到期望位置,在關(guān)節(jié)坐標(biāo)系下操作,可以依次驅(qū)動各關(guān)節(jié)運動,從而引導(dǎo)機器人末端到達(dá)指定的位置。
4、結(jié)語
由于工業(yè)機器人品種眾多,每種工業(yè)機器人的坐標(biāo)系也很多,其命名、確定方式雖然有標(biāo)準(zhǔn),但是有的生產(chǎn)廠家又不按標(biāo)準(zhǔn)執(zhí)行,各有各的叫法。在實際生產(chǎn)應(yīng)用時就顯得非常混亂麻煩。本文詳細(xì)介紹了工業(yè)機器人坐標(biāo)軸命名與常用坐標(biāo)系的確定,以期對使用者有所幫助。
投稿箱:
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年4月 新能源汽車銷量情況
- 2025年4月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年4月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年4月 軸承出口情況
- 2025年4月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年4月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年1月 新能源汽車銷量情況
- 2024年12月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年12月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2024年12月 軸承出口情況
- 2024年12月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2024年12月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2024年11月 金屬切削機床產(chǎn)量數(shù)據(jù)