



AGV+協(xié)作機器人在零件數(shù)控機床加工上下料中的應(yīng)用
2020-9-30 來源: 北京發(fā)那科機電有限公司 作者: 郭樹伽 劉羽 姜彬 王志濤 陳鑫
隨著我國汽車工業(yè)的快速發(fā)展,數(shù)控加工制造技術(shù)正朝著敏捷柔性生產(chǎn)線方向發(fā)展。目前在西方發(fā)達(dá)工業(yè)國家,由數(shù)控車床、C N C加工中心和工業(yè)機器人組成的柔性生產(chǎn)系統(tǒng)已經(jīng)是主流產(chǎn)品。柔性生產(chǎn)線中采用機加工自動化進行工件上下料,簡化了數(shù)控車床加工中心的結(jié)構(gòu),使生產(chǎn)線布局變得緊湊,增強了物料傳輸系統(tǒng)的柔性。
現(xiàn)狀概述
常見的機床自動化上下料的形式,有桁架機械手、交換托盤、物流小車以及工業(yè)機器人等。
機加工自動化的主要用途是將機加工自動化上軌道上的原料工件送到機床內(nèi),等到加工完畢再將成品取出,重復(fù)操作。桁架機械手的工作范圍決定了其構(gòu)成,主要由機加工自動化和定位設(shè)備組成,其中上料及下料操作定位的精密程度決定著產(chǎn)品的質(zhì)量。
機加工自動化生產(chǎn)線主要實現(xiàn)機床制造過程的全盤自動化,并采用了集成加工技術(shù),適用于生產(chǎn)線的上下料、工件翻轉(zhuǎn)、工件轉(zhuǎn)序等。在國內(nèi)的機械加工,目前很多都是使用專機或人工進行機床上下料的方式,這在產(chǎn)品比較單一、產(chǎn)能不高的情況下是非常適合的。隨著社會的發(fā)展、科技的進步、產(chǎn)品更新?lián)Q代加快,使用專機或人工進行機床上下料就暴露出了很多的不足和弱點。首先,專機占地面積大、結(jié)構(gòu)復(fù)雜、維修不便,不利于自動化流水線的生產(chǎn);其次,傳統(tǒng)上下料方式的柔性不夠,難以適應(yīng)日益加快的變化,不利于產(chǎn)品結(jié)構(gòu)的調(diào)整;再次,使用人工會造成勞動強度的增加,容易產(chǎn)生工傷事故,效率相對低下,且使用人工上下料的產(chǎn)品,其質(zhì)量穩(wěn)定性不足,不能滿足大批量生產(chǎn)的需求。
在多臺數(shù)控機床組成的加工生產(chǎn)線上,遇到機加工節(jié)拍時間較長的加工環(huán)境,受限于當(dāng)前主要的自動化設(shè)備的空間布局形式,擴展機器人的的應(yīng)用范圍,對工業(yè)機器人增加了第七軸移動軸,通過地軌式或者天吊式機器人實現(xiàn)長產(chǎn)距離的移動,但仍然受限于機器人行走軌道只能在一條直線上。無法實現(xiàn)對車間平面布置的多臺數(shù)控機床實現(xiàn)自動化上下料。
移動機器人移動機器人正從固定單一的模式,向靈活、可執(zhí)行多重任務(wù)的方向轉(zhuǎn)變。AGV+機器人可以實現(xiàn)更高的靈活和高效自動化加工應(yīng)用以往只有汽車制造商和其他處理大型零部件的行業(yè)才會引進機器人,時至今日,機器人行業(yè)的許多進步成果都集中在消費品制造業(yè)、倉儲和配送中心。
自主移動機器人“實施完全自主的系統(tǒng)在技術(shù)上是可行的,而且成本不會太高。全球的汽車、汽車零部件、其他運輸工具、電子電器等領(lǐng)域都希望減少材料運輸成本。”通常,小工廠所使用的機器人比大型工廠中的靈活性更高,功能也更多,并且小工廠更能受到機器人所帶來的紅利。機器人與AGV系統(tǒng)集成后,就能將加工材料從工具機床和車床移動到倉儲區(qū)。FANUC協(xié)作系統(tǒng)機器人協(xié)同作業(yè)機器人(以下簡稱:協(xié)作機器人)可以與人員在同一個空間工作,而不像傳統(tǒng)的工業(yè)機器人那樣需要將人和機器人使用安全圍欄隔離開。如果協(xié)作機器人與其周邊的人員或物體發(fā)生觸碰,機器人將自動停止。協(xié)作機器人具有協(xié)作性、安全性、快速學(xué)習(xí)、適應(yīng)能力強和高效等特點(見表1)
表1 協(xié)作機器人特點
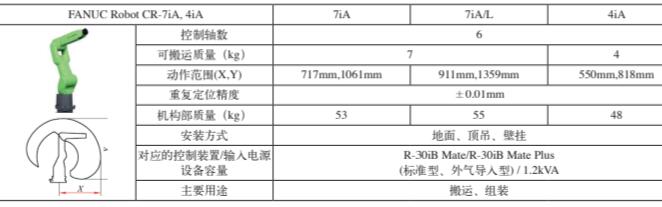
FANUC Robot的特點:
1.協(xié)同作業(yè)
無需安全柵欄,人與機器人可共享某個區(qū)域進行作業(yè),而不像傳統(tǒng)的工業(yè)機器人那樣需要將人和機器人使用安全圍欄隔離開。人與機器人可相互協(xié)調(diào),毫無障礙地進行重零件的搬運、零件的裝配
等各種作業(yè)。
2.安全功能
已經(jīng)取得符合國際標(biāo)準(zhǔn)ISO 10218-1:2011, Category 3, PL=d的安全認(rèn)證。接觸到人時,協(xié)作機器人會安全地自動停止。表面是給人以安心感的綠色的柔軟的罩殼,緩和沖擊力,防止人被夾住,從而保證人員不會受到傷害。
3.智能化和高可靠性
可利用iRVision(內(nèi)置視覺)等各種最新的智能化功能。采用與以往的機器人相同的高可靠性設(shè)計,用戶可放心使用(見圖1)
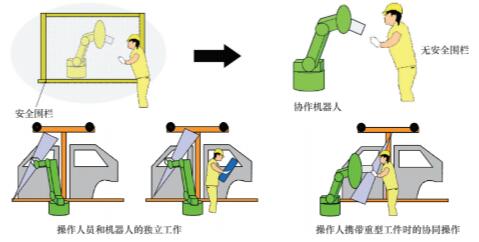
圖1 FANCU協(xié)助機床機器人快速啟動的QSSR功能
只需要使用一根網(wǎng)線即可以輕松實現(xiàn)連接CNC與機器人(見圖2)。
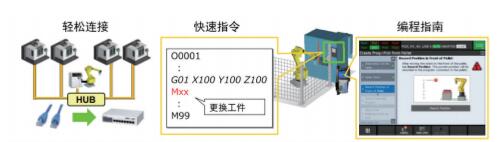
圖2 CNC與機器人互聯(lián)
FANUC QSSR具有快速簡便設(shè)置功能,可以實現(xiàn)CNC與機器人系統(tǒng)的快捷設(shè)定。機床與機器人可以通過顯示界面相互確認(rèn)對方狀態(tài)。在CNC機床啥夠可以輕松實現(xiàn)機器人的示教功能。使用FANUC 數(shù)控系統(tǒng)的快速指令代碼(M代碼),輕松操作機器人。
AGV+協(xié)作機器人在零件加工上下料單元中的應(yīng)用
1.智能制造單元組成
車床單元,車床要求(設(shè)備類型):數(shù)控車削中心
最大車削直徑:≥200mm。
最大加工工件長度:≥150mm。
主軸最高轉(zhuǎn)速:≥5000r/min。
配置自動刀塔,刀塔容量:≥12r/min。
配置FANUC數(shù)控系統(tǒng),系統(tǒng)具備局LOADER軸功能。
桁架要求,桁架動作控制由車床CNC的LOADER軸功能控制。
立加單元,立式加工中心要求,設(shè)備工作臺面距地面高度:800~1000mm;主軸端面距工作臺面最大距離:750~950mm。
刀庫容量:≥24,刀柄形式:BT40。配置C軸轉(zhuǎn)臺,轉(zhuǎn)臺臺面直徑:
150mm。主軸轉(zhuǎn)速:10000r/min。☆C軸轉(zhuǎn)臺轉(zhuǎn)臺型號:CNC-200R(β電動機),四軸聯(lián)動。
夾具要求,夾具設(shè)計需要滿足零件4個機加工面加工,夾具以零件外型定位和夾緊,夾具配置氣檢、定位面清洗功能,保證工件裝夾可靠性。
2.零件加工單元對AGV+FANUC協(xié)作機器人的主要功能要求
(1)AGV底盤框架。AGV小車底盤框架設(shè)計時,要充分考慮AGV小車本身自重、機械手本體及電控柜負(fù)重與尺寸、附加逆變器與電池負(fù)重與尺寸等,外形美觀,符合人體工程學(xué)要求;在滿足功能的前提下,充分考慮空間布局以方便后續(xù)維護,尤其是對于機械手電控柜的布局,考慮電柜散熱問題,機械手電控柜門可全面打開方便維護,機械手示教器建議外掛,方便現(xiàn)場調(diào)試。
(2)MES接口。本次實現(xiàn)AGV+協(xié)作機器人單元,支持MES系統(tǒng)通過無線局域網(wǎng)對AGV小車的任務(wù)管理,具體為,任務(wù)查詢:支持MES系統(tǒng)對當(dāng)前正在執(zhí)行或排隊等待執(zhí)行的任務(wù)查詢,具體為任務(wù)標(biāo)識、任務(wù)詳細(xì)、任務(wù)優(yōu)先級、任務(wù)執(zhí)行狀態(tài)等;任務(wù)下達(dá):支持MES系統(tǒng)對AGV小車的任務(wù)下達(dá)(如特定AGV任務(wù)、充電任務(wù)等),同時AGV反饋任務(wù)下達(dá)標(biāo)識信息。修改或取消任務(wù),支持當(dāng)任務(wù)尚未執(zhí)行時,MES系統(tǒng)可實現(xiàn)對任務(wù)的修改或取消任務(wù);匯報任務(wù)執(zhí)行情況;當(dāng)AGV成功完成一項任務(wù)或由于某些特殊原因?qū)е聼o法完成某項任務(wù)時,AGV小車需向MES報告任務(wù)執(zhí)行結(jié)果;支持MES系統(tǒng)通過無線局域網(wǎng)對AGV小車的狀態(tài)信息查詢,如AGV當(dāng)前站點、運行狀態(tài)(待命、運行、停車、急停等)、當(dāng)前運行速度和方向、外部DI/DO狀態(tài)、當(dāng)前電池電壓等。
(3)與機械手的信息交互。除了與MES系統(tǒng)進行通訊外,一般現(xiàn)場設(shè)備還需要與AGV進行物理對接,如在本項目中,要通過AGV上的機械手實現(xiàn)機床的上下料,這時就需要與機床進行信號交互,考慮到Fanuc機械手與Fanuc CNC通訊的便利性,這里由Fanuc機械手與FanucCNC來實現(xiàn)上下料過程中的信號交互,但需要AGV小車支持通過現(xiàn)場總線或硬件IO的方式,將當(dāng)前點位狀態(tài)等信息發(fā)送給Fanuc機械手,F(xiàn)anuc機械手在獲得點位到達(dá)信號后,再實現(xiàn)相應(yīng)的動作需求。
(4)無線局域網(wǎng)通訊系統(tǒng)。本項目中AGV與MES,AGV上Fanuc機械手與Fanuc CNC均通過通訊速度高、抗干擾性好的無線通訊方式,無線通訊距離能夠覆蓋整個小車運行范圍。其中AGV與MES的通訊,可通過AGV小車本身的無線網(wǎng)卡接入到局域網(wǎng);對于AGV上Fanuc機械手與Fanuc CNC的通訊,采用無線EtherNet/IP協(xié)議,考慮無線傳輸?shù)姆€(wěn)定性、干擾等因素,在AGV小車上額外增加無線AP,專用于Fanuc機械手與外圍設(shè)備的通訊。
(5)人機界面。操作員可通過AGV本體上的人機界面,實現(xiàn)設(shè)對AGV的網(wǎng)絡(luò)設(shè)置、系統(tǒng)參數(shù)設(shè)定、運行狀態(tài)查詢、故障查詢等。一旦AGV出現(xiàn)故障,操作和維護人員能夠通過AGV的故障診斷系統(tǒng)及時準(zhǔn)確地查找故障的原因,便于故障的排除。
(6)設(shè)備工況監(jiān)控。支持對AGV的運行狀態(tài)及任務(wù)信息等進行監(jiān)控,以圖形化的界面對AGV行進路線與位置信息進行顯示;支持對任務(wù)信息歷史、AGV工作狀態(tài)日志查詢等功能,可供專業(yè)人員在維修或維護時解讀。
(7)充電系統(tǒng)。為機器人提供可靠的充電供應(yīng),充電效率高,輸出功率大,充電狀態(tài)穩(wěn)定可靠,并能通過無線網(wǎng)絡(luò)實時監(jiān)控;充電接口輸出可控,非充電狀態(tài)下,充電接口處于斷電狀態(tài),小車自動充電時充電樁進入充電狀態(tài)。無法自動充電時支持人工手動進行充電。AGV+協(xié)作機器人實現(xiàn)自動化物流搬運與上下料AGV工作循環(huán)。人工啟動加工循環(huán)→AGV+機器人單元自動到單元料架上抓取零件,并放置到AGV暫存臺上→AGV移動到車床加工單元上料口部位,機器人自動將芯軸零件放置到上料臺上→AGV移動到高速立加設(shè)備前方,機器人將零件放置到設(shè)備夾具上,完成上料動作→待立加加工結(jié)束后,機器人從設(shè)備夾具上抓取零件至AGV暫存臺上→AGV自動移動到車床加工單元下料口部位,待芯軸零件加工完成并放置到下料口部位,機器人自動抓取芯軸,放置到AGV暫存臺上→AGV返回單元料架,機器人將零件放置到單元上料臺上。
結(jié)語
該機器人項目將智能AGV技術(shù)與協(xié)作機器人相結(jié)合,通過在區(qū)域內(nèi)的自主移動,實現(xiàn)貨物的智能抓取、搬運和操作。突破了常規(guī)機器人只能在導(dǎo)軌上作直線運動的限制、區(qū)域移動小車在行駛過程中存在的安全隱患、移動后再定位精度低的問題。同時,借助機械臂內(nèi)置的工業(yè)相機,以及AGV小車中的電池及逆變電流器,讓AGV小車可以自由載著機械臂到達(dá)指定工位,進行產(chǎn)品的精密的定位和抓取、放置。兩種智能技術(shù)互相成就,成為彼此自由的雙手雙腳,極大拓展了機械臂與AGV小車的適用范圍,為零件加工機床自動化上下料的智能化打開了新的空間。
投稿箱:
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年4月 新能源汽車銷量情況
- 2025年4月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年4月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年4月 軸承出口情況
- 2025年4月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年4月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年1月 新能源汽車銷量情況
- 2024年12月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年12月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2024年12月 軸承出口情況
- 2024年12月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2024年12月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2024年11月 金屬切削機床產(chǎn)量數(shù)據(jù)